Composée translation / rotation

Bonjour à tous
Je cherche à montrer que la composée d'une rotation par une translation est encore une rotation.
Soit donc $T$ une translation de vecteur $\overrightarrow{U}$ et $R$ une rotation de centre $O$ distincte de l'identité. Je cherche donc à montrer que $f = T \circ R$ possède un unique point fixe.
Pour l'unicité c'est triviale. Par contre pour l'existence je rame un peu. Je voudrais montrer qu'il existe un point $M$ tel que $\overrightarrow{MR(M)} = \overrightarrow{U}$. Pour cela je considère $D$ la perpendiculaire à $vect(\overrightarrow{U})$ passant par $O$ puis je remarque qu'il existe une droite $D'$ dirigée par $\overrightarrow{U}$ telle que $D$ soit médiatrice de $[AB]$ sachant que $AB$ est de même longueur que $\overrightarrow{U}$ et l'angle $\widehat{AOB}$ soit celui de la rotation $R$.
Moralement ça me parait bon... Cela dit, l'existence de $D'$ est un peu foireuse. Je ne vois pas comment éviter la continuité de l'application qui à une droite $L$ dirigée par $\overrightarrow{U}$ associe l'angle $\widehat{AOB}$ avec $A$ et $B$ définis comme précédemment.
Toute aide est la bienvenue et j'avoue qu'après 4h de géométrie je ne vois plus grand chose ...
t-mouss
Je cherche à montrer que la composée d'une rotation par une translation est encore une rotation.
Soit donc $T$ une translation de vecteur $\overrightarrow{U}$ et $R$ une rotation de centre $O$ distincte de l'identité. Je cherche donc à montrer que $f = T \circ R$ possède un unique point fixe.
Pour l'unicité c'est triviale. Par contre pour l'existence je rame un peu. Je voudrais montrer qu'il existe un point $M$ tel que $\overrightarrow{MR(M)} = \overrightarrow{U}$. Pour cela je considère $D$ la perpendiculaire à $vect(\overrightarrow{U})$ passant par $O$ puis je remarque qu'il existe une droite $D'$ dirigée par $\overrightarrow{U}$ telle que $D$ soit médiatrice de $[AB]$ sachant que $AB$ est de même longueur que $\overrightarrow{U}$ et l'angle $\widehat{AOB}$ soit celui de la rotation $R$.
Moralement ça me parait bon... Cela dit, l'existence de $D'$ est un peu foireuse. Je ne vois pas comment éviter la continuité de l'application qui à une droite $L$ dirigée par $\overrightarrow{U}$ associe l'angle $\widehat{AOB}$ avec $A$ et $B$ définis comme précédemment.
Toute aide est la bienvenue et j'avoue qu'après 4h de géométrie je ne vois plus grand chose ...
t-mouss
Réponses
-
Dans quel espace es-tu? Dans le plan? Peut-être que dans ce cas les complexes seraient utiles...
-
Bonjour T-Mouss.
Dans mon jeune temps, on m'a appris à faire une figure. Regarde ce que devient un point et tu trouveras assez facilement quel point est sa propre image (en gros la translation le ramène).
A moins que tu veuilles faire ça en affine, où seule la matrice de l'application vectorielle associée compte, et comme celle de la translation est l'identité ..
Cordialement -
Bonsoir
Pour montrer que la composée d'une rotation par une translation est encore une rotation il suffit peut être de décomposer la translation en deux rotation.
La composée de trois rotations est une rotation")
merci -
On décompose la translation en produit de réflexions $t = s_1s_2$ ; on recommence avec la rotation $r = s_3 s_4$.
On se débrouille pour que $s_4 = s_1$, et il reste $rt=s_3s_2$\ldots -
Bonjour
Merci à tous pour toutes ces pistes...
GB : et que se passe-t-il si par malheur l'axe de $s_2$ est parallèle à celui de $s_3$ ? Est-ce évident qu'ils ne sont jamais parallèles ?
Pour Gérard : Tu ne penses quand même pas que je suis venu poster ici sans faire préalablement de figure... non mais ! Le problème c'est que je ne vois pas de centre évident pour la nouvelle rotation... J'ai essayé de translater le centre de R par T mais il semble que ça ne soit pas le nouveau centre... Par contre j'aime beaucoup l'idée de l'application vectorielle associée. Cela dit si je suis ton raisonnement, puisque seule la partie linéaire compte pourquoi les symétries glissées ne sont-elles pas des symétries ??
Mais pour en revenir à l'aspect géométrique je crois avoir effectivement trouvé comment faire, mais cela revient à trouver un point M tel que $\overrightarrow{f(M)M} = \overrightarrow{u}$. Alors effectivement avec un dessin on est convaincu de suite mais je doute que ce genre d'argument "visuel" passe devant un jury de Capes.
Pour développer un peu cette idée je dirais qu'il suffit de construire un triangle AOB isocèle en O (O est le centre de R) et de sorte que $\overrightarrow{AB}$ soit colinéaire à $\overrightarrow{U}$ et l'angle AOB soit égal à celui de la rotation. Ensuite on construit A'OB' afin d'obtenir une configuration de thalès et on peut alors ajuster pour que $\overrightarrow{AB} = \overrightarrow{U}$.
Ainsi ça me paraît correct comme explication pour accompagner un dessin.
Enfin pour Skilveg j'ai effectivement essayer avec les complexes mais j'avoue que ça m'a saoulé.... je vais re-regarder vite fait histoire de voir si il n'y a pas moyen d'aboutir rapidement... mais j'en doute.
Merci encore pour ces pistes variées... et pardonnez moi si je n'ai pas saisi quelque chose d'évident dans vos interventions (je pense notamment à GB )
)
t-mouss -
Si $r(z)=ze^{i\theta}$ et $t(z)=z+a$, alors $t\circ r(z)=ze^{i\theta}+a=\left(z-\frac{a}{1-e^{i\theta}}\right)e^{i\theta}+\frac{a}{1-e^{i\theta}}$...
Après en dimension supérieure je ne sais pas; le message de gb sous-entendait que l'on est en dimension 2, non? (rotation comme produit de deux réflexions) -
Il n'y a pas de malheur t-mouss.
L'angle orienté des droites $d_3$ et $d_4$ axes respectifs des symétries $s_3$ et $s_4$ est $\theta/2$ où $\theta$ est l'angle de la rotation. L'angle des droites $d_1$ et $d_2$ est nul. De plus on a choisi $d_3 = d_2$ et la formule de Chasles assure donc que l'angle des droites $d_1$ et $d_3$ est $\theta/2$.
Maintenant tu peux te passer d'angles : la droite $d_4$ coupe la droite $d_2 = d_3$ au centre de la rotation et les droites $d_1$ et $d_2$ sont parallèles donc, d'après le postulat d'Euclide") ) les droites $d_1$ et $d_4$ sont sécantes.
) les droites $d_1$ et $d_4$ sont sécantes.
Bruno -
Pour skilveg.
En dimension supérieure, tu ne peux rien dire d'autre que : la composée est un déplacement. Par exemple, dans l'espace euclidien de dimension 3, tu obtiens soit une rotation quand le vecteur de la translation est orthogonal à la direction de l'axe de la rotation soit un vissage (ou déplacement hélicoïdal) sinon.
Bruno -
Bonjour t-mouss,
Lorsque l'on décompose $t = s_1s_2$, les axes $D_1$ et $D_2$ sont parallèles, et orthogonaux au vecteur $\vec u$ de la translation ; pour $r = s_3s_4$, les axes $D_3$ et $D_4$ des réflexions sont sécants en le centre $O$ de la rotation dont l'angle est $\alpha = 2(D_4,D_3)$.
On choisit donc $D_1=D_4$ la droite normale à $\vec u$ passant par $O$, on se retrouve avec $rt = s_3s_2$ avec $(D_2,D_3) = (D_4,D_3)$ puisque $D_2$ est parallèle à $D_1=D_4$ : $rt$ est la rotation d'angle $\alpha$ et de centre le point d'intersection de $D_2$ et$D_3$.
Par contre si l'on compose deux rotations $r$, de centre $O$ et d'angle $\alpha$, et $r'$, de centre $O'$ et d'angle $\alpha'$, on considère la réflexion $\sigma$ d'axe $\Delta = (OO')$ (une droite quelconque passant par $O$ si $O = O'$, et on décompose $r = \sigma s$ avec $s$ d'axe $D$ passant par $O$ et $\alpha = 2(D,\Delta)$, et $r' = s'\sigma$ avec $s'$ d'axe $D'$ passant par $O'$ et $\alpha' = 2(\Delta,D')$. On obtient $r'r=s's$, qui est une translation ou une rotation, suivant que les droites $D$ et $D'$ sont parallèles ou non, c'est-à-dire suivant que $\alpha+\alpha'$ est nul ou non.
Remarque : les angles des rotations sont des angles de vecteurs, mesurés modulo $2\pi$, alors que les angles de droites sont mesurés modulo $\pi$, les écritures $\alpha = 2(D,D')$ sont donc parfaitement légitimes. -
Merci bruno j'avais répondu à GB un peu rapidement...
Pour skilveg je ne comprends pas ce que tu fais... j'ai l'impression que tu transforme T o R en T' o R'.... en tout cas je ne vois pas de rotation seule...
Par contre il me semble que $z.e^{i.\theta} + a = (z + a.e^{-i.\theta}).e^{i.\theta}$ et on obtient bien l'expression d'une rotation de même angle. Je ne comprend pas comment je suis passé à côté de ça...
Merci encore de vous intéresser à mes considérations existentielles de capésard...
t-mouss -
GB toujours aussi soucieux de la clarté... décidément impressionnant...
t-mouss -
Pour moi, $z\mapsto(z-\frac{a}{1-e^{i\theta}})e^{i\theta}+\frac{a}{1-e^{i\theta}}$ est une rotation d'angle $\theta$ et de centre $\frac{a}{1-e^{i\theta}}$, ce qui est aussi le cas de $z\mapsto (z + ae^{-i\theta})e^{i\theta}$ pour laquelle il faut quand même réécrire pour le voir.
-
oui oui au temps pour moi...
j'avais oublié qu'il fallait ajouter le centre... sans doute pour ça que je n'y arrivais pas ^^
t-mouss -
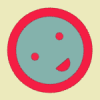
Un exemple comme corollaire
Soient trois polygones congruents coplanaires (ici quadrilatères concaves) A₁︎B₁︎C₁︎D₁︎, A₂︎B₂︎C₂︎D₂︎ et A₃︎B₃︎C₃︎D₃︎.
A₁︎B₁︎C₁︎D₁︎ et A₂︎B₂︎C₂︎D₂︎ sont images l'un de l'autre par rotation (ou composée d'une rotation et d'une translation, qui peut se ramener à une rotation).
A₂︎B₂︎C₂︎D₂︎ et A₃︎B₃︎C₃︎D₃︎ sont images l'un de l'autre par symétrie axiale d'axe XY.
Les médiatrices de tous les segments
• A₁︎A₂︎, B₁︎B₂︎, etc. concourent en un seul point, centre de rotation entre les deux polygones,
• A₂︎A₃︎, B₂︎B₃︎, etc. sont confondues avec XY en une seule droite, l'axe de symétrie entre les deux polygones,
• A₁︎A₃︎, B₁︎B₃︎, etc. ne concourent pas.
Cordialement,
Jean-Pol Coulon -
Bonjour à tousCette discussion est un peu émouvante par la participation de Bruno mais aussi d'autres personnalités bien connues comme ev et gb.Je ne connaissais pas encore le forum à l'époque.On voit qu'il y a 15 ans, certains n'arrivaient pas à composer deux isométries.Maintenant cela n'a plus d'importance: rotations, translations? Rien à cirer.Bien sûr gb avait donné la solution: à savoir décomposer chaque déplacement en produit de deux symétries axiales en se débrouillant pour que les seconde et troisième symétries axiales soient les mêmes.C'est fait en long, en large et en travers dans le Lebossé-Hémery.Mais qui sait aujourd'hui décomposer un déplacement en produit de deux symétries axiales?Le seul petit reproche que j'aurais pu faire à gb est de ne pas avoir proposé de figure.Celle de gypsic n'a rien à voir avec la discussion ouverte par t-mouss et d'ailleurs je ne comprends pas très bien quel est son son objet.Qu'est devenu t-mouss?Espérons qu'il a eu son CAPES et ensuite son agrégation!Quel suspens!Qui va se dévouer, quinze ans après, pour faire la figure demandée par t-mouss?On devine déjà la réponse mais sait-on jamais?Amicalementpappus
-
Bonjour pappus,La toute première intervention commençait par :Je cherche à montrer que la composée d'une rotation par une translation est encore une rotation.C'est bien ce que j'essaie de montrer sur mon schéma.
Je place sur le plan deux polygones congruents A₁︎B₁︎C₁︎D₁︎ et A₂︎B₂︎C₂︎D₂︎ identiques (qui ne sont pas en miroir l'un de l'autre).
La transformation A₁︎B₁︎C₁︎D₁︎ en A₂︎B₂︎C₂︎D₂︎ peut être décomposée en une translation de vecteur AA' du point A₁︎ (et des autres points) en A' (et B', C', D' pour les trois autres points) suivie d'une rotation de centre A' donnant A₂︎ = A', B₂︎, C₂︎ et D₂︎.C'est d'ailleurs ainsi que j'ai construit le schéma sur GeoGebra.
Je ne montre pas ces deux étapes mais bien le résultat final, et la construction (par concourance des médiatrices) du centre de rotation donnant la rotation équivalente à la composée d'une translation suivie d'une rotation ... autrement dit la question princeps de cette discussion.
Il est bien évident que deux symétries axiales successives réalisent deux images en miroir successives , et ramènent à une situation équivalente à la transformation de A₁︎B₁︎C₁︎D₁︎ en A₂︎B₂︎C₂︎D₂︎ par translation et/ou rotation.
Si je n'ai réalisé qu'une seule symétrie axiale, c'est bien pour montrer qu'elle donnait une image congruente mais en miroir du polygone de départ, qui ne peut pas être obtenue par une simple rotation.Cordialement,
Jean-Pol Coulon -
Mon cher GypsicMerci pour ces précisions!Dans le problème de t-mouss, il faut se concentrer plus sur les transformations que sur les figures sur lesquelles elles opèrent.Tout ce que demande t-mouss, c'est la construction du centre de la rotation produit $T\circ R$Les données sont les suivantes:La rotation $R$ est donnée par son centre $O$, un point $A$ et son image $A'=R(A)$.La translation $T$ est déterminée par l'image $A''=T(A')$. Corrigé, merci JLBEn résumé les données sont les quatre points $O$, $A$, $A'$, $A''$La modeste requête de t-mouss?A partir de ces données, construire le centre $O'$ de la rotation produit $R'=T.R$.Sauras-tu faire la figure demandée qui attend de voir le jour depuis quinze ans?L'aide?Lire attentivement la contribution de gbPas besoin de nombres complexes ni de polygones bizarroïdes mais plutôt de la règle ébréchée, du compas rouillé et du rapporteur mité!Amitiéspappus

-
Bonjour à tousOn a attendu quinze ans.Je pense qu'on peut attendre quinze ans de plus que le résultat serait le même.Il est en effet plus prudent de se limiter à ce qu'on sait encore faire: aligner les points.La figure ci-dessous propose une construction possible mais il y en a bien d'autres!Quant à sa justification, à quoi bon se décarcasser?La bête est morte et bien morte!AmicalementpappusPSEt cent fois dans son sein le fer a repassé: tracer sur la figure ci-dessous le centre $O''$ de la rotation $R''=R.T$

-
Bonsoir @Pappus,Il me semble qu'il manque un "prime" dans ton pénultième message : n'y faut-il pas lire $A'' = T(A')$ ?Bien amicalement, JLB
-
Merci JLB, j'ai corrigé cette erreur!Amicalementpappus
-
Un essai

Au départ
A -> A' par rotation de centre O
A' -> A" par translation de vecteur A'A"
Je place l'image A'₁︎ de A' par symétrie axiale OA.
Je termine le parallélogramme AA'A" par le point A"₁︎.
Autrement dit je réalise sans le dire la composée de rotation translation avec un deuxième point A'₁︎ symétrique du premier A' obtenu par rotation. Son image par rotation est A, avec ensuite la translation (le parallélogramme) donnant A"₁︎.
Le centre de rotation P recherché est à l'intersection des médiatrices AA" et A'₁︎A"₁︎.
-
Bonjour,Une figure pour le centre $O''$ de $R''=R.T$ :

-
Bravo Cailloux
C'est vrai !
Une preuve ?
Sans doute incompréhensible chez nous ?
Pas de Thalès et pas de Pythagore !
$R''=R.T=T^{-1}.(T.R).T=T^{-1}.R'.T$
Donc $O''=T^{-1}(O')$
Amitiés
pappus -
Bonjour pappus,Une petite justification pour ta construction de $O'$ centre de la rotation $T.R$ :D'une part, $O'A=O'A''$ par construction.
D'autre part $(\overrightarrow{O'A},\overrightarrow{O'A''})=2(\overrightarrow{aA},\overrightarrow{aA''})=2(\overrightarrow{aA},\overrightarrow{aA'})=(\overrightarrow{OA},\overrightarrow{OA'})$
Amitiés.
-
Bonjour à tousBonjour
Je cherche à montrer que la composée d'une rotation par une translation est encore une rotation.
c'est faux. Prends une rotation d'angle 0 et une translation de vecteur non nul, tu n'obtiens pas une rotation en les composant.
Ce site est fatigant. Les gens modifient sans cesse leurs messages passés, et on ne comprend plus rien à la discussion. Je suis nostalgique du temps où, si on postait une bêtise, on devait l'assumer. Et si on cite le passage pour l'ancrer, l'administrateur supprime en disant qu'on n'a pas besoin de recopier le message passé. -
Le message d'origine date de 2008 donc...

-
Bonjour PetitLutinMalicieux
La situation d'une rotation nulle suivie d'une translation non nulle est « limite ».
Sa solution par rotation simple admet donc construction « limite » que Geogebra et la logique nous donnent sans rechigner : le nouveau centre de rotation est rejeté à l'infini.
Situation normale
Situation « limite »
Le centre de rotation est rejeté à l'infini, et le cercle (l'arc de rotation) se transforme logiquement en droite (segment ou vecteur).
Cordialement,
Jean-Pol Coulon










Connectez-vous ou Inscrivez-vous pour répondre.
Bonjour!
Catégories
- 163.2K Toutes les catégories
- 9 Collège/Lycée
- 21.9K Algèbre
- 37.1K Analyse
- 6.2K Arithmétique
- 53 Catégories et structures
- 1K Combinatoire et Graphes
- 11 Sciences des données
- 5K Concours et Examens
- 11 CultureMath
- 47 Enseignement à distance
- 2.9K Fondements et Logique
- 10.3K Géométrie
- 65 Géométrie différentielle
- 1.1K Histoire des Mathématiques
- 68 Informatique théorique
- 3.8K LaTeX
- 39K Les-mathématiques
- 3.5K Livres, articles, revues, (...)
- 2.7K Logiciels pour les mathématiques
- 24 Mathématiques et finance
- 314 Mathématiques et Physique
- 4.9K Mathématiques et Société
- 3.3K Pédagogie, enseignement, orientation
- 10K Probabilités, théorie de la mesure
- 773 Shtam
- 4.2K Statistiques
- 3.7K Topologie
- 1.4K Vie du Forum et de ses membres
In this Discussion
Qui est en ligne 36







 +28 Invités
+28 Invités