Université de Poitiers, M1MFA, TD Calcul Diff
Réponses
-
@Aliounesarr96. Exercice 8, b et c. Rien à redire. Excellente astuce pour le c !
-
J'ai modifié l'exercice 3.b)
-
Merci Solène !
-
Exercice 7:
Soit f(x,y,z)=$\exp{(xyz)}$ définie sur $\mathbb{R^3}$
Soit $(x,y,z) \in \mathbb{R^3}$
La matrice Jacobienne de f est: $J_f(x,y,z)=\left(\begin{matrix}
yz\exp{(xyz)} & xz\exp{(xyz)} & xy\exp{(xyz)} \end{matrix}\right)$
On obtient donc comme Hessienne de f: $H(x,y,z)= \left(\begin{matrix}
(yz)^2\exp{(xyz)} & (1+xyz)z\exp{(xyz)} & (1+xyz)y\exp{(xyz)} \cr
(1+xyz)z\exp{(xyz)} & (xz)^2\exp{(xyz)} & (1+xyz)x\exp{(xyz)} \cr
(1+xyz)y\exp{(xyz)} & (1+xyz)x\exp{(xyz)} & (xy)^2\exp{(xyz)} \end{matrix}\right)$
H est symétrique réelle de dimension 3x3. Alors H est définie positive positive si et seulement si les mineurs principaux de H (les $D_k$, k=1,2,3) sont strictement positifs.
$D_1 = (yz)^2\exp{(xyz)} >0 ssi (y,z) \in \mathbb{R^*}^2$
$D_2 = \left|\begin{matrix}
(yz)^2\exp{(xyz)} & (1+xyz)z\exp{(xyz)} \cr
(1+xyz)z\exp{(xyz)} & (xz)^2\exp{(xyz)} \end{matrix}\right|$
$D_2 = \exp{(2xyz)}((xyz)^2z^2-(1+xyz)^2z^2)$
$D_2 = \exp{(2xyz)}z^2(-1-2xyz)$
D'où $D_2 >0$ ssi $z \in \mathbb{R^*}$ et $-1-2xyz>0 \Longleftrightarrow xyz < \frac{-1}{2}$
On doit avoir xyz $\ne$ -1 pour pouvoir diviser
$D_3$= $\exp{(3xyz)}(1+xyz)^3 \left|\begin{matrix}
\frac{(yz)^2}{(1+xyz)} & z & y \cr
z & \frac{(xz)^2}{(1+xyz)} & x \cr
y & x & \frac{(xy)^2}{(1+xyz)} \end{matrix}\right|$
$D_3$ = $\exp{(3xyz)}(1+xyz)^3 (\frac{(yz)^2}{(1+xyz)}(\frac{(xz)^2}{(1+xyz)}*\frac{(xy)^2}{(1+xyz)}-x^2)-z(z*\frac{(xy)^2}{(1+xyz)}-xy)+y(xz-y* \frac{(xz)^2}{(1+xyz)}))$
$D_3$= $\exp{(3xyz)}(1+xyz)^3 (\frac{(yz)^2(xz)^2(xy)^2}{(1+xyz)^3}-\frac{(xyz)^2}{(1+xyz)}-\frac{(xyz)^2}{(1+xyz)}+zxy+yxz- \frac{(xyz)^2}{(1+xyz)})$
$D_3$ = $\exp{(3xyz)}(1+xyz)^3 (\frac{(yz)^2(xz)^2(xy)^2}{(1+xyz)^3}-3\frac{(xyz)^2}{(1+xyz)}+2xyz)$
$D_3$ = $\exp{(3xyz)}(1+xyz)^2(\frac{(xyz)^4}{(1+xyz)^2}-(xyz)^2+2xyz)$
$D_3$ = $\exp{(3xyz)}(3(xyz)^2+2xyz)$
Or $\exp{(3xyz)}>0$, $\forall (x,y,z) \in \mathbb{R^3}$ et pour que $(3(xyz)^2+2xyz)>0$ on pose t=xyz et doit donc trouver quand est-ce que t(3t+2)$>0$. Or t(3t+2)$>0$ si $\left\{\begin{matrix}
t>0 \cr
t>\frac{-2}{3} \end{matrix}\right.$ ou si $\left\{\begin{matrix}
t<0 \cr
t<\frac{-2}{3} \end{matrix}\right.$.
Donc xyz(3xyz+2)$>0$ $\forall xyz \in \mathbb{R}$\ {$\frac{-2}{3}$}
Donc finalement, H est définie positive $ \forall (x,y,z) \in (\mathbb{R^*})^3$ tels que $xyz<\frac{-1}{2}$ et $xyz \ne \frac{-2}{3}$
donc finalement, H est définie positive $ \forall (x,y,z)$ tels que $ xyz \in$ ]$-\infty;\frac{-2}{3}$ [ U ] $\frac{-2}{3};\frac{-1}{2}$[
J'ai rajouté un 2 dans l'exponentielle dans le calcul du $D_2$ et j'ai modifié toute la fin à partir d'après le calcul du $D_3$. -
Exercice 8: d)
On suppose que f est de classe $C^2$ pour tous l'exercice
On suppose que f est convexe. montrons que sa hessienne est positive en tout point de U. i.e: Montrons que $\forall h \in U$, $<d^2f_xh,h> \ge 0$
Soient $t \in [0,1]$, $(x,y) \in U^2$ et $h \in U$
Alors la convexité de f donne: $f((1-t)x+ty) \le (1-t)f(x)+tf(y)$. D'où $f(x+t(y-x)) \le t(f(y)-f(x))$, puis on divise par t et on fait tendre t vers 0 et on obtient alors: $f(y) \ge f(x) + <\nabla f(x),y-x>$.
Donc on peut écrire $f(y) \ge f(x) + <\nabla f(x),y-x>$ et $f(x) \ge f(y) + <\nabla f(y),x-y>$.
D'où (en sommant), $f(y) + f(x) \ge f(x) + f(y) + <\nabla f(x),y-x> + <\nabla f(y),x-y>$
$\Longleftrightarrow 0 \ge <\nabla f(x),y-x> + <\nabla f(y),x-y> \Longleftrightarrow 0 \le <\nabla f(y)-\nabla f(x),y-x>$
On applique cette formule avec x et y=x+th.
On obtient $<\nabla f(x+th)-\nabla f(x),th> \ge 0$. On divise par $t^2$ et on fait tendre t vers 0. On a donc $<d^2f_xh,h> \ge 0 \forall (x,y) \in U^2$. donc la hessienne de f est positive en tout point de U
On suppose maintenant que la hessienne de f est positive en tout point de U, alors $<d^2f_xh,h> \ge 0 \forall (x,y) \in U^2$.
Or $f(y) = f(x) + <\nabla f(x),y-x> + \frac{1}{2}<d^2f_{x+t(y-x)}(y-x),y-x> +o(||x-y||) \ge f(x) + <\nabla f(x),y-x>$ (car la hessienne de f est positive et qu'on peut négliger le petit o).
Donc f est convexe
On a donc finalement l'équivalence
J'ai rajouté le petit o dans la deuxième implication -
Voici une nouvelles série d'exercices sur les extrema liés (ou sous contrainte).
Souvent l'exercice sera présenté sous la forme d'un problème d'optimisation. Il faudra montrer que les extrema recherchés existent bien et se mettre dans un cadre d'application du théorème du cours.
Exercice 1. Déterminer les extrema de la fonction $f$ : $\R^2\longrightarrow \R$, $(x,y)\mapsto e^{xy}$, sous la contrainte $x^3 +y^3 +x+y-4=0$.
Exercice 2. Dans l'espace affine euclidien, rapporté à une repère orthonormé, on considère le plan $P$ d'équation $ax+by+cz+d=0$ et un point $M_0$ fixé, de coordonnées $(x_0 ,y_0 ,z_0 )$. Montrer que la distance de $M$ à $P$ est donnée par
$$
d(M_0 ,P)=\frac{\vert ax_0 +by_0 +cz_0 +d\vert}{\sqrt{a^2 +b^2 +c^2}}\ .
$$
On pourra minimiser la fonction $f(M) =d(M,M_0 )^2$ sur $D$.
Exercice 3. Dans $\R^3$, optimiser la fonction donnée par $f(x,y,z)=(x-1)^2 +y^2 +(z-1)^2$ sous les contraintes $x^2 +y^2 +z^2 =1$ et $x+y+z=0$. On donnera une interprétation géométrique du résultat trouvé.
Exercice 4. Soient $E$ un espace vectoriel euclidien et $f\in {\mathcal L}(E)$ un endomorphisme symétrique. En optimisant la fonction $f(v)=\langle f(v),v\rangle$, sous la contrainte $\Vert v\Vert^2 =1$, montrer que $f$ admet une valeur propre.
Exercice 5. Soient $a$ un réel $>0$ et $n$ un entier $\geqslant 2$. En optimisant la fonction $f$: $]0,+\infty [^n\longrightarrow \R$, $(x_1 ,...,x_n )\mapsto x_1 x_2 \cdots x_n$, sous la contrainte $x_1 +x_2 +\cdots +x_n =a$, montrer l'inégalité :
$$
\left( \prod_{i=1,...,n} x_i \right)^{1/n}\leqslant \frac{1}{n}\, \sum_{i=1,...,n}x_i , \ (x_1 ,...,x_n )\in [0,+\infty [^n\ .
$$
Quand a-t-on égalité ?
Exercice 6. Inégalité de Hadamard. On munit $\R^n$ se sa structure euclidienne habituelle. Montrer que
pour tous $v_1$, ..., $v_n\in E\backslash \{ 0\}$, on a
$$
\vert {\rm det}(v_1 ,...,v_n )\vert \leqslant \Vert v_1 \Vert \cdots \Vert v_n \Vert\ ,
$$
avec égalité si, et seulement si, la famille $(v_1 ,...,v_n )$ est orthogonale. N.B. Le déterminant est calculé dans la base canonique.
Exercice 7. Quelques problèmes classiques d'optimisation.
(a) On considère des boîtes de conserve fermées, cylindriques, de base un disque de rayon $r$ et de hauteur $d$. A surface fixé $S_0$, quels sont les paramètres $r$ et $d$ qui donnent un volume de boîte maximal.
(b) On considère des boîtes à chaussures parallèlipédiques, sans couvercle, de dimensions $l\times L\times h$, et de surface imposée $S_0$. Déterminer les paramètres $l$, $L$ et $h$ pour que le volume de la boîte soit maximal.
Exercice 8. Soient $a$, $b>0$ fixés. On travaille dans le plan affine euclidien rapporté à un repère orthonormé. Déterminer les rectangles, inscrits dans l'ellipse d'équation $x^2 /a^2 +y^2 /b^2 =1$ et de côtés parallèles aux axes de coordonnées, qui sont d'aire maximale.
Edit : j'ai modifié l'énoncé de l'exercice 6, qui était incorrect. -
@Solène. Exercice 7. Les déterminants sont corrects (sauf pour $D_2$, où il faut un facteur $\exp (2xyz)$, mais ça ne change pas la discussion du signe). Par contre la discussion du signe de $D_3$ n'est pas correcte. $D_3$ est du signe de $xyz (3xyz +2)$. En posant $t=xyz$, il faut utiliser le signe de $t(3t+2)$ !
Attention aussi que $H$ définie négative si, et seulement si, $-H$ est définie positive. Les mineurs sont reliés comme suit : $D_1 (-H)=-D_1 (H)$, $D_2 (-H)=D_2 (H)$ et $D_3 (-H)=-D_3 (H)$. Donc pour que $H$ soit définie négative il faut que ses $D_1$ et $D_3$ soient $<0$ et sont $D_2$ soit $>0$.
Merci de corriger et bon courage. -
@Solène.Exercice 8d. Pour le premier sens de l'implication, c'est correct. Il faut peut-être rappeler les liens entre différentielles première et seconde d'un côté et gradient de l'autre. Je ferai un point à ce sujet.
Pour l'implication inverse, c'est incorrect car vous oubliez le reste dans le développement limité à l'ordre $2$. -
Bonjour, j'ai modifié l'exercice 7
J'ai rajouté un 2 dans l'exponentielle dans le calcul du $D_2$ et j'ai modifié toute la fin à partir d'après le calcul du $D_3$.
Par contre pour votre:"attention aussi que...", cela veut dire que je dois faire les calculs avec -H et déterminer quand est-ce que -H est définie négative pour que H soit définie positive? -
J'ai modifié l'exercice 8.d) en rajoutant le petit o dans la deuxième implication.
Le gradient d'une fonction f est le vecteur des dérivées partielles de f par rapport aux coordonnées. De plus, on a que la dérivée du gradient est égal au gradient de la dérivée.
Mais je vous laisse faire un point plus précis sur ces liens -
@Solène. Exercice 8d. Merci pour la correction.
Comme expliqué dans mon message, vous pouvez utiliser le critère :
$H$ définie négative ssi $D_1 (H)<0$ et $D_2 (H)>0$ et $D_3 (h)<0$. -
L'argument un "$o$ est négligeable" est insuffisant. Je donnerai une correction.
-
Complément sur le gradient.
Soit $E$ l'espace $\R^n$ muni de sa structure euclidienne usuelle (mais tout ce que je vais écrire sera valide pour $E$ euclidien quelconque). Soient $\Omega$ un ouvert de $E$ et $f$ : $\Omega\longrightarrow \R$ une application différentiable. Si $a\in \Omega$, on définit le gradient de $f$ en $a$ par
$$
\nabla f(a) =(\frac{\partial f}{\partial x_1}(a), ...,\frac{\partial f}{\partial x_n}(a)) \ .
$$
Le gradient de $f$ est la fonction
$$
\nabla\ : \ \Omega \longrightarrow E, \ x\mapsto \nabla f(x)\ .
$$
Cette fonction est entièrement caractérisée par la relation suivante :
$$
df_x (h)=\langle \nabla f(x),h\rangle , \ x\in \Omega ,\ h\in E\ .
$$
Supposons à présent que $f$ est de classe ${\mathcal C}^2$ sur $\Omega$. Alors en tout point $x$ de $\Omega$, $d^2 f_x$ est une application bilinéaire symétrique $E\times E\longrightarrow \R$.
D'un autre côté, la fonction $\nabla f$ est différentiable sur $\Omega$. En la différentiant, on obtient une fonction :
$$
d(\nabla f) \ \Omega \longrightarrow {\mathcal L}(E,E)={\mathcal L}(E)\ .
\Omega \longrightarrow {\mathcal L}(E,E)={\mathcal L}(E)\ .
$$
En particulier, en tout $x\in \Omega$, $d(\nabla f)_x$ est un endomorphisme de $\Omega$. On a alors le fait remarquable suivant.
Proposition. La différentielle du gradient et la différentielle seconde de $f$ sont reliés comme suit :
$$
\forall x\in \Omega , \ \forall h, \ k\in E, \ d^2 f_x (h,k)=\langle d(\nabla f)_x (h),k\rangle\ .
$$
Rappelons que, pour $x\in \Omega$ et $h\in E$, le vecteur $d(\nabla f)_x (h)$ a une interprétation en termes de dérivée directionnelle :
$$
d(\nabla f)_x (h) =\lim_{t\rightarrow} \frac{1}{t}(\nabla f(x+th)-\nabla f(x))\ .
$$
On a donc la relation :
$$
d^2 f_x (h,k) = \lim_{t\rightarrow 0}\frac{1}{t}\langle \nabla f(x+th)-\nabla f(x), k\rangle , \ x\in \Omega , \ h,\ k\in E
$$
C'est cette relation qu'utilise Solène dans sa solution. -
Extrema liés
Début de l'exercice 1:
On note $g(x,y):=x^3+y^3+x+y-4$ et $\gamma := g^{-1}(\{0\})$. On a:
$$dg_{(x,y)}=\begin{pmatrix} 3x^2+1 & 3y^2+1 \end{pmatrix}$$
et $dg$ ne s'annule pas sur $\mathbb R^2$ donc si $f$ admet un extremum local en $a\in\gamma$, on a $df_a=\lambda dg_a$ pour un $\lambda\in\mathbb R$ ($f$ et $g$ sont $\mathcal C^1$ sur $\mathbb R^2$, on applique le premier th du cours sur les extremas avec une contrainte). On a:
$$df_{(x,y)}=\begin{pmatrix} ye^{xy} & xe^{xy} \end{pmatrix}$$
donc si $df_{(x,y)}=\lambda dg_{(x,y)}$ on a
$$\lambda = ye^{xy}/3x^2+1 = xe^{xy}/3y^2+1$$
donc
$$(3y^2+1)y=(3x^2+1)x$$
puis $x=y$. En reportant dans la contrainte $g=0$, on a $2(x^3+x)=4$ et $x=y=1$. Donc si $f$ admet un extremum sur $\gamma$ il est atteint en $(1,1)$.
Il faut ensuite montrer que sur $\gamma$, qui est fermée mais pas bornée, lorsque $||(x,y)||$ tend vers l'infini, $f(x,y)(>0)$ tend vers $0$ et ainsi que $f$ admet bien un maximum global. -
@Betrand. Extrema liés. Exercice 1. C'est correct. N'oubliez pas de préciser la régularité des fonctions pour pouvoir appliquer le théorème des extrema liés.
Indication pour le comportement à l'infini. Considérons la fonction $h$ : $\R\longrightarrow \R$, $t\mapsto -y^3 -y$. Alors $h$ est bijective et $\displaystyle \lim_{t\rightarrow \pm\infty} h^{-1}(t)=\mp\infty$. De plus, pour $(x,y)\in \R^2$, on a $g(x,y)=0$ si, et seulement si, $y=h^{-1}(x^3 +x-4 )$ si, et seulement si, $x=h^{-1}(y^3 +y-4)$. -
Fin de l'exo 1:
Sur $\gamma$ ($\gamma := g^{-1}(\{0\})$ avec $g(x,y):=x^3+y^3+x+y-4$), lorsque $||(x,y)||$ tend vers l'infini, alors $|x|$ ou $|y|$ tend vers l'infini, par exemple $x$ tend vers $+\infty$. Puisque: $y^3+y=-x^3-x+4$ pour un unique $y$ (voir l'indication de Mr Broussous), on a alors que $y$ tend vers $-\infty$. Donc $xy$ tend vers $-\infty$ puis $f(x,y)=e^{xy}$ tend vers $0^+$. Mais $f$ est continue positive et $\gamma$ est fermée, donc $f$ admet bien un maximum global sur $\gamma$ (on a déjà rencontré une situation similaire) et ce doit être en $(1,1)$ d'après ce qui précède. -
Pour l'exercice 2, qui est D ? C'est l'ensemble $ \left\{ (x,y,z) \in \mathbb{R}^{3} , (x,y,z) \in P \right\} $? Je suis partie de cette hypothèse mais j'ai du mal à faire l'exercice. Je suis perturbée par l'équation de P.
Exercice 3 :
On pose $D = g^{-1} (0,0)$ où $g(x,y,z ) = (x^{2}+y^{2}+z^{2}-1,x+y+z)$ pour tout $(x,y,z) \in \mathbb{R}^{3}$. Les fonctions f et g sont de classe $C^{\infty}$.
Matrice jacobienne de g en un point $ (x, y , z) \in \mathbb{R}^{3}$:
\begin{pmatrix} 2x & 2y & 2z \\ 1 & 1 & 1\end{pmatrix}
Le rang de cette matrice est 2 si $(x,y,z) \neq (x,x,x), x \in \mathbb{R}$. Or un tel point n'est pas dans D. Donc la différentielle de g est surjective sur D.
Supposons qu'un point $ (x,y,z) \in \mathbb{R}^{3}$ soit un extremum local de la fonction f sur D. Alors, il existe $\alpha, \beta \in \mathbb{R}$ tel que:
$\left\{\begin{matrix}
2(x-1 )= 2 \alpha x + \beta \cr
2y = 2\alpha y + \beta \cr
2(z-1) = 2\alpha z + \beta \end{matrix}\right. \Longleftrightarrow \left\{\begin{matrix}
2x(1-\alpha)= \beta +2\cr
2y = 2\alpha y + \beta \cr
2z(1-\alpha)= \beta +2\end{matrix}\right. $
Supposons que $\alpha = 1$ alors d'après la seconde ligne du système, $\beta = 0$ et dans la première ligne, on a $0 = 1$ ce qui est impossible. Donc $\alpha \neq 1$. Et on a donc :
$\left\{\begin{matrix}
x =z \cr
2y = 2\alpha y + \beta \end{matrix}\right. $
On souhaite que le point $(x,y,x) \in D$, d'où on a :
$\left\{\begin{matrix}
2x^{2} + y^{ 2} -1 =0\cr
2x + y = 0 \end{matrix}\right.
\Longleftrightarrow
\left\{\begin{matrix}
y = -2x\cr
6x^{2} - 1 = 0 \end{matrix}\right.
$
Et ainsi, on en conclut que $ x = \pm \frac{\sqrt{24}}{12} = \pm \frac{\sqrt{6}}{6}$ et les possibilités d'extremum sont:
$A = (\frac{\sqrt{6}}{6}, -\frac{\sqrt{6}}{3}, \frac{\sqrt{6}}{6})$ et $ B = (-\frac{\sqrt{6}}{6}, \frac{\sqrt{6}}{3}, -\frac{\sqrt{6}}{6}) $
Réciproquement, D est un compact dont f atteint sont minimum et son maximum sur D et on a : $ f(A ) = \frac{9-2\sqrt{6}}{3}$ et $f(B ) = \frac{9+2\sqrt{6}}{3}$. Donc, le point A est un minimum global et le point B est un maximum global de f sur l'ensemble D. -
@Laura. Pour l'exercice 2, c'est une faute de frappe : $D=P$.
Pause dominicale, reprise des commentaires lundi matin.
Bon courage à tous. -
Correction de la question 8d.
Il s'agit de montrer que si la Hessienne est positive en tout point de $U$, alors $f$ est convexe sur $U$.
L'hypothèse est : pour tous $h\in \R^n$, $x\in U$, $d^2 f_x (h,h)\geqslant 0$. Il faut montrer que pour tous $t\in [0,1]$, $x$, $y\in U$, $f(tx+(1-t)y)\leqslant tf(x)+(1-t)f(y)$. Pour cela, il suffit de montrer que, pour tous $x\not= y$ dans $U$, la restriction de $f$ au segment $[x,y]$ est convexe comme fonction d'une seule variable, c'est-à-dire que la fonction $h$ : $[0,1]\longrightarrow \R$, $s\mapsto f(x+s(y-x))$ est convexe. Cette fonction étant deux fois dérivable (comme composée de fonctions deux fois différentiables), le critère de L1 affirme que c'est équivalent à montrer que la dérivée seconde de $h$ est positive sur $[0,1]$. Calculons la.
Soit $s\in [0,1]$. Par le théorème de dérivation des fonctions composées, on a $h'(s) = \langle \nabla f(x+s(y-x)) ,y-x\rangle$. En dérivant une seconde fois, on obtient :
$$
h'' (s) = \langle d(\nabla f)_{x+s(y-x)}(y-x) ,y-x\rangle
$$
Or par le complément sur le lien entre différentielle du gradient et hessienne, ceci s'écrit encore :
$$
h'' (s) = d^2 (f)_{x+s(y-x)}(y-x,y-x)
$$
qui est bien positif ou nul par hypothèse. C.Q.F.D. -
@Laura. Exercice 3, extremas liés. C'est correct, merci !
Pouvez-vous donner une interprétation géométrique ?
Une méthode plus sûre pour manier les différentielles. Le théorème des extrema liés affirme que les vecteurs $(2(x-1), 2y, 2(z-1))$, $(2x,2y,2z)$ et $(1,1,1)$ sont liés. Il vaut mieux écrire cette condition sous la forme suivante :
$$
\left\vert \begin{array}{ccc}
1 & 1 & 1\\
2x & 2y & 2z \\
2(x-1) & 2y & 2(z-1)
\end{array}\right\vert = 0 \ .
$$
Ce déterminant se calcule très vite et on n'a pas besoin d'introduire des $\alpha$, $\beta$ et faire des cas. -
Géométriquement, je ne sais pas ce que cela signifie.
-
Sur l'exercice 3.
Laura Locussolle écrivait:
> Géométriquement, je ne sais pas ce que cela
> signifie.
L'ensemble sur lequel on optimise est l'intersection de la sphère $x^2 +y^2 +z^2 -1=0$ (sphère de centre l'origine et de rayon $1$) et du plan $x+y+z=0$, qui passe par le centre de la sphère. C'est le cercle $C$ du plan $x+y+z=0$ de centre l'origine et de rayon $1$. L'exercice propose donc de calculer les extrema de la distance du point M(1,0,1)$ au cercle $C$. -
exo 3: une interprétation géométrique:
$D$ est l'intersection de la sphère unité et d'un plan passant par $(0,0,0)$, soit un cercle de centre $(0,0,0)$ et de rayon $1$.
On peut aussi voir que les lignes de niveaux de $f$, (les ensembles $\{f(x,y,z)=\lambda\}$, pour un $\lambda>0$) sont des sphères concentriques de centre $(1,0,1)$ et de rayon $\lambda$ et donc le minimum sur $D$ est le plus proche de $(1,0,1)$ et le maximum le plus éloigné.
Et on voit que les deux points qu'a trouvés Laura sont diamétralement opposés. -
@Bertrand. Exercice 3. Oui c'est correct.
-
exo4:
On pose, $\forall v\in E$, $F(v)=<f(v),v>$ et $g(v)=||v||^2=<v,v>$. On a, $\forall v,h\in E$, $$dF_v(h)=<f(v),h>+<f(h),v>=<f(v),h>+<h,f(v)>=2<f(v),h>$$ où on a utilisé la symétrie de $f$, et $$dg_v(h)=2<v,h>.$$
Les fonctions $F$ et $g$ sont $\mathcal C^1$ sur $E$, donc, premièrement, $F$ atteint un min et un max le compact $\{v \in E,||v||^2=1\}=g^{-1}(\{1\})$; et deuxièment, on peut appliquer le théorème des extrema liés sur $g^{-1}(\{1\})$ où $dg$ est non nulle pour dire qu'en un $v_0 \in g^{-1}(\{1\})$ qui atteint un de ces extremum, $ dF=\lambda dg$ soit $2<f(v_0),.>=2\lambda <v_0,.>$, soit $f(v_0)=\lambda v_0$. Donc $f$ admet une valeur propre. -
@Bertrand. Exercice 4. C'est correct, merci ! Dans une rédaction finale, les variables ($v$, $h$) mériteraient d'être quantifiées. C'est bien de garder cette bonne habitude si possible.
-
Je donne quelques indications pour les exercices sur les extrema liés.
> Exercice 5. Soient $a$ un réel $>0$ et
> $n$ un entier $\geqslant 2$. En optimisant la
> fonction $f$: $]0,+\infty [^n\longrightarrow \R$,
> $(x_1 ,...,x_n )\mapsto x_1 x_2 \cdots x_n$, sous
> la contrainte $x_1 +x_2 +\cdots +x_n =a$, montrer
> l'inégalité :
> $$
\left( \prod_{i=1,...,n} x_i
\right)^{1/n}\leqslant \frac{1}{n}\,
\sum_{i=1,...,n}x_i , \ (x_1 ,...,x_n )\in
[0,+\infty [^n\ .
$$
> Quand a-t-on égalité ?
Rechercher d'abord les extrema sur l'ensemble $\{ (x_1 ,...,x_n )\in [0,+\infty [^n\ ; \ x_1 +\cdots +x_n =a\}$ qui a le mérite d'être compact.
> Exercice 6. Inégalité de Hadamard. On
> munit $\R^n$ se sa structure euclidienne
> habituelle. Montrer que
> pour tous $v_1$, ..., $v_n\in E\backslash \{ 0\}$,
> on a
> $$
\vert {\rm det}(v_1 ,...,v_n )\vert \leqslant
\Vert v_1 \Vert \cdots \Vert v_n \Vert\ ,
$$
avec égalité si, et seulement si, la famille
$(v_1 ,...,v_n )$ est orthogonale. N.B. Le
déterminant est calculé dans la base canonique.
En divisant par les normes des vecteurs, et par multilinéarité du déterminant, l'inéquation s'écrit :
$$
\vert {\rm det}(\frac{v_1}{\Vert v_1\Vert} ,...,\frac{v_n}{\Vert v_n \Vert} )\vert \leqslant 1\ .
$$
On est donc conduit à optimiser la fonction $f(v_1 ,v_2 ,...,v_n )={\rm det}(v_1 ,v_2 ,...,v_n )$ sous les contraintes $g_i (v_1 ,...,v_n )=\Vert v_i\Vert^2 =1$, $i=1,...,n$. Il faut donc calculer les différentielles des fonctions $f$ et $g_i$, $i=1,...,n$. La différentielle de $g_i$, $i=1,...,n$, se calcule en s'inspirant de ce qui a déjà été fait en TD. Pour différencier $f$, on remarque qu'elle est multilinéaire, donc de différentielle donnée par
$$
df_{(v_1 ,...,v_n )}(h_1 ,...,h_n )=\sum_{i=1}^{n} {\rm det}(v_1 ,...,v_{i-1},h_i, v_{i+1},...,v_n), (v_1 ,...,v_n )\in E^n , \ (h_1 ,...,h_n )\in E^n
\ .$$ -
exercice 5:
On utilise les notations habituelles: $df=(x_2..x_n \;...\; x_1..x_{n-1})$ et $dg=(1\; ...\; 1)$. $f$ et $g$ sont $\mathcal C^1$ sur $]0,+\infty[^n$, donc si $f$ admet un extremum sur $\gamma=]0,+\infty[^n\cap g^{-1}(\{a\})$ en un point $(x_1,...,x_n)$, on a $df=\lambda dg$. On trouve la solution $(a/n,...,a/n)$ (avec $\lambda=(a/n)^{n-1}$) qui vérifie l'égalité dans l'énoncé.
On voit que $\overline{\gamma}$ est compacte puisqu'elle est contenue dans $[0,a]^n$ et fermée. Donc $f$ y atteint des extremums. Les points de $\overline{\gamma} \setminus \gamma$ sont des minimums puisqu'ils annulent $f$. Donc $(a/n,...,a/n)$ est bien un maximum sur $\gamma$ et on a l'inégalité de l'énoncé.
Il reste à montrer que l'égalité n'est atteinte que pour $x_1=x_2=..=x_n$. -
Bertrand86 écrivait:
> exercice 5:
> Il reste à montrer que l'égalité n'est atteinte
> que pour $x_1=x_2=..=x_n$.
Il faut simplement utiliser que le maximum est atteint en un unique point.
Pause dominicale. Réouverture de la boutique lundi matin. -
Fin de lexo5:
L'équation $df=\lambda dg$ donne:
$$\begin{equation}
\left\{\begin{matrix}
x_2..x_n &=& \lambda \cr
... \cr
x_1..x_{n-1} &=& \lambda \cr
\end{matrix}\right.
\iff
\left\{\begin{matrix}
\ln x_2+..+ \ln x_n &=& \ln \lambda \cr
... \cr
\ln x_1+..+ \ln x_{n-1} &=& \ln \lambda \cr
\end{matrix}\right.
\end{equation}$$
qui a pour unique solution $\ln x_i = 1/(n-1) \ln \lambda$ pour tout $i$, soit $x_1=...=x_n$ et de là on retrouve le point pour lequel on avait l'égalité, et c'est le seul. -
Voici une série d'exercices sur le thème de l'inversion locale.
Exercice 1. On considère l'application $f$ : $\R^2\longrightarrow \R^2$
donnée par $f(r,\theta )=(r\cos \theta ,r\sin \theta )$.
a) En quels points $f$ est-elle un ${\mathcal C}^\infty$-difféomorphisme local ?
b) Montrer que $f$ réalise un ${\mathcal C}^\infty$-difféomorphisme de $]0,+\infty [\times ]-\pi ,\pi [$ sur son image (que l'on précisera).
Exercice 2. On définit une application $f$ : $\R^2 \longrightarrow \R^2$ par $f(x,y)= (x^2 -y^2 ,2xy)$.
a) En quels points $f$ est-elle un difféomorphisme local ?
b) Montrer que $f$ réalise un ${\mathcal C}^\infty$ difféomorphisme de $\Omega =\{ (x,y)\ ; \ x>0\}$ sur son image (que l'on précisera).
Exercice 3. a) Racine $p$ième matricielle. Soient $n,p\geqslant 1$ des entiers. Montrer qu'il existe un voisinage $V$ de $I_n\in {\rm M}(n,\R )$ dans lequel toute matrice poss\`ede une racine $p$i\`eme. Pouvez-vous en expliciter un ?
b) Logarithme matriciel. Calculer la différentielle de l'exponentielle de matrice $\exp$ : ${\rm M}(n,\R )\longrightarrow {\rm M}(n,\R )$ en $0_n$. Montrer qu'il existe un voisinage $V$ de $I_n$ tel que pour toute matrice $M\in V$, il existe une matrice $N$ vérifiant $\exp (N)=M$.
Exercice 4. On considère l'application $f$ : $\R^2 \longrightarrow \R^2$ définie par $f(x,y)=(x+y, xy)$. En quels points $f$ est-elle un difféomorphisme local ? Montrer que $f$ réalise un ${\rm C}^\infty$-difféomorphisme de $\Omega =\{ (x,y)\in \R^2 \ ; \ x>y\}$ sur son image que l'on précisera.
Exercice 5. Soit $g$ : $\R\longrightarrow \R$ une application de classe ${\mathcal C}^1$, telle que $\vert g'(t)\vert \leqslant k$, pour tout $t\in \R$, pour un certain $k\in ]0;1[$. On définit une application $F$ : $\R^2 \longrightarrow \R^2$ par $F(x,y)=(x+g(y),y+g(x))$.
a) Montrer que $f$ est partout un ${\mathcal C}^1$-difféomorphisme local.
b) En appliquant le théorème du point fixe à $\varphi (x,y)=(a-g(y), b-g(x))$ ($(a,b)\in \R^2$ fixé), montrer que $F$ est bijective.
c) Que peut-on dire de $F$ ? -
Correction de l'exercice 6 (inégalité de Hadamard).
Exercice 6. Inégalité de Hadamard. On munit $E=\R^n$ se sa structure euclidienne habituelle. Montrer que
pour tous $v_1$, ..., $v_n\in E\backslash \{ 0\}$, on a
$$
\vert {\rm det}(v_1 ,...,v_n )\vert \leqslant \Vert v_1 \Vert \cdots \Vert v_n \Vert\ ,
$$
avec égalité si, et seulement si, la famille $(v_1 ,...,v_n )$ est orthogonale.
N.B. Le déterminant est calculé dans la base canonique.
Indication. En divisant par les normes des vecteurs, et par multilinéarité du déterminant, l'inéquation s'écrit :
$$
\vert {\rm det}(\frac{v_1}{\Vert v_1\Vert} ,...,\frac{v_n}{\Vert v_n \Vert} )\vert \leqslant 1\ .
$$
On est donc conduit à optimiser la fonction $f(v_1 ,v_2 ,...,v_n )={\rm det}(v_1 ,v_2 ,...,v_n )$ sous les contraintes
$g_i (v_1 ,...,v_n )=\Vert v_i\Vert^2 =1$, $i=1,...,n$. Il faut donc calculer les différentielles des fonctions $f$ et $g_i$,
$i=1,...,n$. La différentielle de $g_i$, $i=1,...,n$, se calcule en s'inspirant de ce qui a déjà été fait en TD. Pour différencier $f$, on remarque qu'elle est multilinéaire, donc de différentielle donnée par
$$
df_{(v_1 ,...,v_n )}(h_1 ,...,h_n )=\sum_{i=1}^{n} {\rm det}(v_1 ,...,v_{i-1},h_i, v_{i+1},...,v_n),
(v_1 ,...,v_n )\in E^n , \ (h_1 ,...,h_n )\in E^n
\ .$$
La solution utilise les notations de l'indication. On notera $x_1$, $x_2$,...,$x_n$ les composantes d'un $n$-uplet $x\in E^n$ : $x=(x_1 ,...,x_n )$. On note $S^1$ la sphère unité de $E$ et $C$ le compact de $E^n$ donné par $C=S^1 \times \cdots \times S^1 =\displaystyle \bigcap_{i=1,...,n}g_i^{-1}(1)$.
Puisque $f$ et continue sur $C$, elle y admet un maximum $M$ et un minimum $m$. Nous allons montrer que $M=1$, $m=-1$, que $M$ est atteint exactement sur les bases orthonormées directes de $E$ (pour son orientation donnée par la base canonique) et que $m$ est atteint exactement sur les bases orthonormées indirectes. Le résultat en découlera.
La fonction $f$ et les fonctions $g_i$, $i=1,...,n$, sont polynomiales, donc de classe ${\mathcal C}^\infty$ sur $E^n$. La différentielle de $f$ est donnée dans l'indication. Pour $i=1,...,n$, la différentielles de $g_i$ est donnée par
$$
d(g_i)_v (h)=2\, \langle v_i ,h_i \rangle , \ v\in E^n ,\ h\in E^n\ .
$$
Nous allons montrer que les différentielles $d(g_i )_v$, $i=1,...,n$, sont linéairement indépendant sur $C$, ce qui nous mettra dans les conditions d'application du théorème des extrema liés. Supposons qu'on ait une relation linéaire
$$
\displaystyle \sum_{i=1,...,n}\lambda_i \, d(g_i )_v =0 ,
$$
pour un $v\in C$. Alors en testant cette relation sur $h=(0,...,0,v_i,0,...,0)$ avec $v_i$ en $i$ème position, on obtient $2\lambda_i\, \Vert v_i\Vert^2 =2\lambda_i =0$, et ceci pour $i=1,...,n$. D'où le résultat annoncé.
Soit $v\in C$ un vecteur où $f$ est extrémale. On remarque la famille $v$ doit être libre, car $f$ s'annule sur les famille liées, prend des valeurs $<0$ et des valeurs $>0$. Alors par le théorème des extréma liés, il existe $\lambda_1$,...,$\lambda_n\in \R$ tels que
$$
df_v (h) =2\, \sum_{i=1,...,n} \lambda_i \langle v_i ,h_i \rangle , \ h\in E^n\ .
$$
Fixons $i\in \{ 1,...,n\}$ et prenons $h$ de la forme $(0,...,0,k,0,...,0)$, $k\in E$ en $i$ème position. La relation précédente s'écrit alors :
$$
{\rm det} (v_1 ,...,v_{i-1},k,v_{i+1},...,v_n )=2\lambda_i \, \langle v_i ,k \rangle\ .
$$
En prenant $k=v_i$, on a que $\lambda_i\not= 0$ ($f(v)$ est non nul car la famille $v$ est libre). En prenant $k$ quelconque dans ${\rm Vect}\, \{ v_j \ ; \ j\not= i\}$, le déterminant s'annule, donc $\langle v_i ,k\rangle =0$. Il s'ensuit que la famille $v$ est orthogonale (donc orthonormée).
Il reste à obtenir la valeur de $f$ sur une base orthonormée $v$. Soit $M$ la matrice carrée $n\times n$ dont la $i$ème colonne est formée des coordonnées de $v_i$, pour $i=1,...,n$, de sorte que $f(v)={\rm det}(M)$. Puisque $M$ est la matrice de passage entre deux bases orthonormées, elle est orthogonale, donc de déterminant $\pm 1$. Par définition de l'orientation, son déterminant vaut $1$ (resp. $-1$) si la famille $v$ est directe (resp. indirecte). -
Inversion locale
Exercice 1:
1) Les fonctions composantes de $f$ sont ${\mathcal C}^\infty$ et $$J_f(r,\theta)=\begin{pmatrix}
\cos\theta & -r\sin\theta\\
\sin\theta & r\cos\theta
\end{pmatrix}$$ est de déterminant $r$. Donc $f$ est un ${\mathcal C}^\infty$-difféomorphisme local en tout point $(r,\theta)$ avec $r\ne 0$.
2) Il faut montrer que $f$ est injective de $]0,+\infty [\times ]-\pi ,\pi [$ dans $\mathbb R^2\setminus ]-\infty,0]\times \{0\}$. Si $f(r,\theta)=f(r',\gamma)$, on a :
\begin{cases} r\cos\theta = r'\cos\gamma \\ r\sin\theta =r'\sin\gamma \end{cases}
donc si $\theta=0$, $\gamma=0$ puis $(r,\theta)=(r',\gamma)$, sinon $\tan\theta=\tan\gamma$, et puisque $r'/r=\sin\theta/\sin\gamma>0$, $\gamma=\theta$, puis $r=r'$. Donc $f$ est injective de $]0,+\infty [\times ]-\pi ,\pi [$ dans $\mathbb R^2\setminus ]-\infty,0]\times \{0\}$, et d'après 1) c'est un $\mathcal C^{\infty}$-difféomorphisme entre ces ensembles. -
Bertrand86 écrivait :
> 2) Il faut montrer que $f$ est injective de $]0,+\infty [\times ]-\pi ,\pi [$ dans $\mathbb R^2\setminus ]-\infty,0]\times \{0\}$.
> Si $f(r,\theta)=f(r',\gamma)$, on a :
>
> \begin{cases} r\cos\theta = r'\cos\gamma \\
> r\sin\theta =r'\sin\gamma \end{cases}
>
> donc si $\theta=0$, $\gamma=0$ puis
> $(r,\theta)=(r',\gamma)$, sinon
> $\tan\theta=\tan\gamma$, et puisque
> $r'/r=\sin\theta/\sin\gamma>0$, $\gamma=\theta$,
> puis $r=r'$. Donc $f$ est injective de $]0,+\infty
> [\times ]-\pi ,\pi [$ dans $\mathbb R^2\setminus
> ]-\infty,0]\times \{0\}$, et d'après 1) c'est un
> $\mathcal C^{\infty}$-difféomorphisme entre ces
> ensembles.
Votre discussion de l'injectivité est un peu maladroite.
Si $f(r,\theta )=f(r',\gamma )$. Alors $r^2 = (r\cos\theta )^2 +(r\sin\theta )^2 = (r'\cos\gamma )^2 +(r' \sin\gamma )^2 =(r')^2$, d'où $r=r'$. De là on tire $\cos \theta =\cos\gamma$ et $\sin\theta =\sin\gamma$ et donc $\theta \equiv \gamma$ $[2\pi ]$. Ainsi $\theta =\gamma$, vu que $\theta$, $\gamma\in ]-\pi ,\pi [$.
Autre remarque, l'injectivité ne suffit pas, il faut la bijectivité de $f$. Mais j'ai compris que la surjectivité était sous-entendue. -
EXERCICE2:
a)
Les composantes de $f$ sont polynomiales, donc de classes ${\mathcal C}^\infty$ par conséquent $f$ est de classe ${\mathcal C}^\infty$
$$J_f(x,y)=2\begin{pmatrix} x& -y& \\ y& x \end{pmatrix}$$ $|J_f(x,y)| = 2(x^2 + y^2)$ donc $|J_f(x,y)| \ne 0$ si et seulement si $(x,y) \ne (0,0)$
par suite $f$ est un ${\mathcal C}^\infty$-difféomorphisme local en tout point $(x,y)$ de $\mathbb{R}^2$ avec $x\ne0$ et $y\ne0$.
b)
$\Omega = \{(x,y) \in \mathbb{R}^2 ; x>0\}$
soit $(x,y) \in \Omega$ d’après la question a) $J_f(x,y) =2(x^2 + y^2)$ alors $J_f(x,y) \ne 0$ donc $f$ est un ${\mathcal C}^\infty$-difféomorphisme de $\Omega$ dans $f(\Omega)$.
Déterminons $f(\Omega)$:
Soit $(x,y) \in \Omega$ tels que $(u,v) = f(x,y)$ alors $\begin{cases} u=x^2-y^2 \\ v=2xy \end{cases}$ et donc $x$ et $y$ sont solutions de l'équation $4t^4-4ut^2-v^2=0$ en posant $T=t^2$ on a $4T^2-4uT-v^2=0$. Comme $x$ et $y$ sont solutions donc le discriminant de cette équation du second degré est positif donc $\Delta =16(u^2+v^2) >0$ donc $f(\Omega) =\{(u,v) \in \mathbb{R}^2; u\ne0 ,v\ne0 \} = \mathbb{R}^2$\(0,0)
EXERCICE4:
Pour les mêmes raison que l’exercice 2 $f$ est de classe ${\mathcal C}^\infty$. La matrice Jacobienne de $f$ est donnée par:
$$J_f(x,y)=\begin{pmatrix} 1& 1& \\ x& y \end{pmatrix}$$ $|J_f(x,y)| = x-y$ donc $f$ est ${\mathcal C}^\infty$-difféomorphisme local en tout point $(x,y)$ de $\mathbb{R}^2$ tels que $x>y$ donc pour tout point dans $\Omega = \{(x,y) \in \mathbb{R}^2 ; x>y\}$.
Determinons $f(\Omega)$:
Soit $(x,y) \in \Omega$ tels que $(u,v) = f(x,y)$ alors $\begin{cases} u=x+y=S \\ v=xy=P \end{cases}$, alors $x$ et $y$ sont solutions de l'équation du second degré $t^2-St+P=0$. Comme cette équation admet deux solutions distinctes donc le discriminant est positif par suite $\Delta = S^2-4p>0$. Ainsi $f$ est un ${\mathcal C}^\infty$-difféomorphisme de $\Omega$ dans $f(\Omega)= \{(s,p) \in \mathbb{R}^2 ; s^2>2p\}$.
: -
Bonjour Alioune
J'ai remarqué une petite erreur dans ton exercice 4. La matrice Jacobienne de f est donnée par $\left(\begin{matrix}
1 & 1 \cr
y & x \end{matrix}\right)$ et du coup on a $|J_f(x,y)|=y-x$ et donc f est un $C^{\infty}$-difféomorphisme local en tout point $(x,y) \in \mathbb{R}^2$ tels que $y>x$ donc pour tout point dans $\Omega =$ {$(x,y)\in \mathbb{R}^2;y>x$} -
@AliouneSarr. Dans les deux exercices, vous oubliez l'injectivité. Rappelons que si $f$ : $\Omega\subset E\longrightarrow F$ est une application de classe $C^k$, $k\geqslant 1$, où $E$, $F$ sont deux EVN de dimension finie et $\Omega$ un ouvert de $E$, alors :
-- Si $f$ est partout un $C^k$-difféomorphisme local, $f(\Omega )$ est un ouvert de $F$.
- -- Si de plus $f$ est injective, $f$ réalise un $C^k$-difféomorphisme de $\Omega$ dans $f(\Omega )$.
De plus dans l'exercice 2, l'image est incorrecte. Merci de corriger. Plus précisément :
Attention, ce sont $x^2$ et $-y^2$ qui sont solutions de l'équation $4T^2 -4uT -v^2 =0$ !
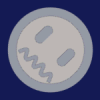
Une autre façon plus simple de voir les choses est d'identifier $\R^2$ au plan complexe. L'application $f$ n'est alors rien d'autre que $z\mapsto z^2$. Elle envoie $\Omega =\{ z\in \C^* \ ; {\rm arg}(z)\in ]-\pi /2 ,\pi /2 [\ {\rm mod}\ 2\pi\}$ sur $f(\Omega ) = \{ z\in \C^* \ ; \ {\rm arg}(z)\in ]-\pi ,\pi [\ {\rm mod}\ 2\pi \}$. Donc $f(\Omega )$ est $\R^2$ privé de la demi-droite $\{ (x,0)\ ; \ x\leqslant 0\}$.
Je joins un dessin. -
@Solène. Attention, le fait d'être un difféomorphisme local correspond à la non annulation du déterminant jacobien. Par contre son signe n'a aucune importance !
-
Exercice 3: b)
On pose $exp: \mathcal{M}_n(\mathbb{R}) \longrightarrow \mathcal{M}_n(\mathbb{R})$ qui a A associe exp(A)=$\sum^{\infty}_{k=0} \frac{1}{k!} A^k$. On note $||.||$ une norme sur $\mathcal{M}_n(\mathbb{R})$ telle que $||AB|| \le ||A|| ||B||$ pour tout $A,B \in \mathcal{M}_n(\mathbb{R})$.
On a $||(A+H)^n-A^n-\sum^{n-1}_{k=0} A^kHA^{n-k}|| \le (||A||+||B||)^n+||A||^n-\sum^{n-1}_{k=0} ||A||^k||H||||A||^{n-k}$.
Puisque $(A+H)^n-A^n-\sum^{n-1}_{k=0} A^kHA^{n-k}$ est une somme (de coefficients tous 1) de monômes en A et H, on remarque que $\sum^{n-1}_{k=0} ||A||^k||H||||A||^{n-k}=n(||A||^{n-1}||H||)$. La somme de termes général $\frac{(A+H)}{n!}$ est absolument convergente, d'où $\frac{A^n}{n!}$ aussi et donc on a aussi que $\sum^{n-1}_{k=0} A^kHA^{n-k}$ est absolument convergente. On a aussi que $\sum^{0}_{k=0} A^kHA^{n-k}=0$. Et donc, on obtient: $||exp(A+H)-exp(A)-\sum^{\infty}_{n=1} \frac{\sum^{n-1}_{k=0} A^kHA^{n-k}}{n!}|| \le exp(||A||+||H||)-exp(||A||)-exp(||A||)||H||=O(||H||^2)$.
Donc l'exponentielle de matrice est une application différentiable au point A(matrice) et sa différentielle est : $Dexp_A(H)=\sum^{\infty}_{n=1} \frac{\sum^{n-1}_{k=0} A^kHA^{n-k}}{n!}$. En particulier, Elle est différentiable en la matrice nulle 0 et sa différentielle est donc l'identité de $\mathcal{M}_n(\mathbb{R})$: Id.
De plus, on peut définir son inverse sur la boule ouverte centrée en 0 de rayon 1(Id) sur n'importe quelle norme subordonnée $||.||$ : si $||H||<1$ on pose, $exp^{-1}(I_n+h)=log(I_n+H)=\sum_{k\ge 1} (-1)^{k-1}\frac{H^k}{k}$. donc il existe bien un voisinage. Et donc c'est un difféomorphisme local sur un voisinage de 0. -
Je ne comprends pas comment trouver les ensembles $f(\Omega)$ dans les exercices 2 et 4
-
@Solène. (Inversion locale pour l'exponentielle de matrice).
Grosso-modo l'idée est bonne. Mais il faut être plus rigoureuse dans l'application du théorème d'inversion locale.
En fait seule la différentielle en l'identité était demandée, mais on n'en aura besoin plus tard partout. Vous devez savoir que $\exp$ est de classe $C^1$ pour appliquer le théorème d'inversion locale.
Pour l'étude en l'identité, on peut écrire pour $H\in {\rm M}(n,\R )$, $\exp (H) = I_n +H +H^2 g(H)$, où
$$
g(H) =\frac{1}{2!}I_n +\frac{1}{3!} H +\cdots =\sum_{n\geqslant 2} \frac{1}{n!}H^{n-2} \ .
$$
On voit que $g$, étant définie par une série convergeant normalement sur tout compact, est continue. Il s'ensuit que $H^2 g(H) = o(\Vert H\Vert )$ en $0_n$, et que $\exp$ est différentiable en $0_n$ de différentielle l'identité de ${\rm M}(n,\R )$.
On va plus généralement montrer que $\exp$ est de classe $C^1$ et calculer sa différentielle partout. Posons $f_n (X)=\frac{X^n}{n!}$, de sorte que $\exp$ est la somme de la série de fonctions $\sum_{n\geqslant 0} f_n$. Les $f_n$ sont de classe $C^1$. De plus pour tout $n\geqslant 1$, la différentielle de $f_n$ en $A\in {\rm M}(n,\R )$ est donnée par $d(f_n )_A (H)=\frac{1}{n!}\sum_{k=0}^{n-1}A^k HA^{n-1-k}$. Une majoration de la norme subordonnée de $d(f_n )_A$ est $\frac{\Vert A\Vert^{n-1}}{(n-1)!}$. Il s'ensuit que la série des différentielles $\sum_{n\geqslant 1} d(f_n )$ est normalement convergente sur tout compact. Par le théorème du cours sur les séries de fonctions, la somme $\exp$ est de classe $C^1$ et pour tous $A$, $H\in {\rm M}(n,\R )$, on a
$$
d{\exp}_A (H)=\sum_{n\geqslant 1}\frac{1}{n!}\sum_{k=0}^{n-1} A^k HA^{n-1 -k}\ .
$$
Puisque $d(\exp )_0$ est inversible, $\exp$ est localement un $C^1$-difféomorphisme en $0_n$.
On définit une application $g$ sur $B_o (I_n ,1)$ par $g(I_n +K) =\sum_{n\geqslant 1}(-1)^{n-1}\frac{K^n}{n}$. Cette série est normalement convergente sur toute boule ouverte de la forme $B_o (I_n ,r)$ avec $r<1$ et $g$ est bien définie. Je vous laisse vérifier, dites-moi si vous voulez des détails, que pour tout $H\in {\rm M}(n,\R )$ telle que $\exp (H)\in B_o (I_n ,1)$, on a $g(\exp (H)=H$. A présent, on vérifie en majorant terme à terme que $exp (H)\in B_o (0_n ,1)$ pour tout $H\in B_o (0_n ,\ln (2) )$. Il s'ensuit que la fonction $\exp$ est injective sur $B_o (0_n ,\ln 2)$ !
Nous allons montrer que $\exp$ est un $C^1$-difféomorphisme local en toute matrice de $B_0 (0_n ,\ln 2 )$, ce qui nous permettra d'appliquer le théorème d'inversion globale pour montrer que $\exp$ réalise un $C^1$-difféomorphisme de $B_0 (0_n ,\ln 2 )$ sur son image.
En utilisant la majoration des différentielles des $f_n$ utilisée plus haut, on montre que pour tout $A\in B_o (0_n ,\ln 2 )$, on peut écrire $d(\exp )_A ={\rm id} +{\mathcal H}$ où $\mathcal H$ est un endomorphisme de ${\rm M}(n,\R )$ de norme subordonnée $<1$. Mais de là il est classique de voir que $d(\exp )_A$ est inversible d'inverse $\sum_{n\geqslant 0} (-1)^n {\mathcal H}^n$. D'où le résultat !
Remarque d'ordre méthodologique. La difficulté de l'exercice vient de ce que l'on travaille en quelque sorte avec $3$ espace vectoriels normés : $\R^n$, ${\rm M}(n,\R )\simeq {\rm End} (\R^n )$ et ${\rm End} ({\rm M}(n,\R ))$. On a fixé une norme $\Vert\cdot \Vert$ sur $\R^n$, on a pris la norme subordonnée $\Vert \cdot\Vert_1$ sur ${\rm M}(n,\R )$, et on a pris la norme subordonnée $\Vert\cdot\Vert_2$ de cette dernière norme sur ${\rm End}({\rm M}(n,\R ))$. Et enfin pour alléger les notations on a fait l'abus de notation : $\Vert \cdot \Vert_2 =\Vert\cdot\Vert_1 =\Vert\cdot\Vert$ !! -
Laura Locussolle écrivait:
> Je ne comprends pas comment trouver les ensembles
> $f(\Omega)$ dans les exercices 2 et 4
Pour l'exercice $2$. On a vu que si on identifie $\R^2$ à $\C$, alors $f(z)=z^2$, $z\in \C$. Ici $\Omega =\{ re^{i\theta}\ ; \ r>0,\ \theta \in ]-\pi /2 ,\pi /2 [\}$. Donc $f(\Omega )=\{ r^2 e^{i2\theta}\ ; \ r>0,\ \theta \in ]-\pi /2 ,\pi /2 [\} = \{ re^{i\theta} \ ; \ r>0\ , \ \theta\in ]-\pi ,\pi [\}$.
Pour l'exercice 4. On a $f(x,y)=(x+y,xy)$ et $\Omega =\{ y> x\}$. On utilise le fait que $f(\Omega )$ est l'ensemble des $(s,p)\in \R^2$ qui ont un antécédent par $f$, c'est-à-dire tels que l'équation $(x+y,xy)=(s,p)$, $y>x$, ait au moins une solution. Les solutions $x$, $y$ sont les racines du polynôme $T^2 -sT +p$. Ce polynôme a deux racines réelles distinctes ssi $\Delta =s^2 -4p >0$. Donc $f(\Omega )=\{ (s,p )\in \R^2 \ ; \ s^2 -4p >0\}$.





Connectez-vous ou Inscrivez-vous pour répondre.
Bonjour!
Catégories
- 163.1K Toutes les catégories
- 7 Collège/Lycée
- 21.9K Algèbre
- 37.1K Analyse
- 6.2K Arithmétique
- 52 Catégories et structures
- 1K Combinatoire et Graphes
- 11 Sciences des données
- 5K Concours et Examens
- 11 CultureMath
- 47 Enseignement à distance
- 2.9K Fondements et Logique
- 10.3K Géométrie
- 62 Géométrie différentielle
- 1.1K Histoire des Mathématiques
- 68 Informatique théorique
- 3.8K LaTeX
- 39K Les-mathématiques
- 3.5K Livres, articles, revues, (...)
- 2.7K Logiciels pour les mathématiques
- 24 Mathématiques et finance
- 312 Mathématiques et Physique
- 4.9K Mathématiques et Société
- 3.3K Pédagogie, enseignement, orientation
- 10K Probabilités, théorie de la mesure
- 772 Shtam
- 4.2K Statistiques
- 3.7K Topologie
- 1.4K Vie du Forum et de ses membres
In this Discussion
Qui est en ligne 36









 +25 Invités
+25 Invités