Université de Poitiers, M1MEEF, Prépa CAPES

Ce fil de discussion concerne la promotion de Master première année MEEF (préparation au concours du capès) de l'université de Poitiers.
Le fonctionnement de ce fil est le suivant :
-- Les élèves peuvent poser des questions sur le cours, donner des solutions d'exercice pour vérification, demander des indications, et aussi proposer des énoncés d'exercice.
-- De mon côté je vais répondre aux questions, en donnant compléments, indications, corrections. Je proposerai des énoncés d'exercice.
-- Je ne vais pas à proprement parler faire de cours. Ce sera aux élèves eux-mêmes d'organiser leurs révisions du programme de Licence. Je répondrai à toutes les questions.
Pour démarrer, je propose que l'on se concentre sur les thèmes suivants (mais ça n'est pas obligatoire) :
-- Projection orthogonale.
-- Orientation, produit vectoriel, produit mixte.
-- Mesure d'angles en dimension 2 ou 3.
-- Isométries vectorielles.
-- Isométries vectorielles en dimension 2 ou 3.
-- Isométries affines en dimension 2 ou 3.
Bien cordialement. Et n'oubliez pas que c'est vous les premiers qui animez ce fil de discussions.
Le fonctionnement de ce fil est le suivant :
-- Les élèves peuvent poser des questions sur le cours, donner des solutions d'exercice pour vérification, demander des indications, et aussi proposer des énoncés d'exercice.
-- De mon côté je vais répondre aux questions, en donnant compléments, indications, corrections. Je proposerai des énoncés d'exercice.
-- Je ne vais pas à proprement parler faire de cours. Ce sera aux élèves eux-mêmes d'organiser leurs révisions du programme de Licence. Je répondrai à toutes les questions.
Pour démarrer, je propose que l'on se concentre sur les thèmes suivants (mais ça n'est pas obligatoire) :
-- Projection orthogonale.
-- Orientation, produit vectoriel, produit mixte.
-- Mesure d'angles en dimension 2 ou 3.
-- Isométries vectorielles.
-- Isométries vectorielles en dimension 2 ou 3.
-- Isométries affines en dimension 2 ou 3.
Bien cordialement. Et n'oubliez pas que c'est vous les premiers qui animez ce fil de discussions.
Réponses
-
Avertissement : j'ai modifié l'énoncé de l'exercice 2 !
Voici quelques exercices sur les projections orthogonales.
Exercice 1. On munit $\R^3$ se sa structure euclidienne habituelle. Soit $P$ le plan vectoriel de $\R^3$ d'équation $2x+y+z=0$.
(a) Déterminer $P^\perp$.
(b) Soit $p$ (resp. $s$) la projection orthogonale sur $P$ (resp. la symétrie orthogonale par rapport à $P$). Calculer les coordonnées de $p(v)$ et $s(v)$ pour tout $v=(x,y,z)\in \R^3$.
(c) Déterminer les matrices de $p$ et $s$ dans la base canonique.
(d) Déterminer la matrice de la projection orthogonale $q$ sur $P^\perp$ dans la base canonique.
(e) Calculer, pour tout $v=(x,y,z)\in \R^3$, la distance de $v$ à $P$.
Exercice 2. Calculer, dans $\R^4$ muni de sa structure euclidienne habituelle, la distance du vecteur $(1,1,0,0)$ au plan $P$ engendré par $(1,0,1,0)$ et $(1,-1,1,-1)$.
Exercice 3. Pour $a$, $b\in \R$, on note
$$
f(a,b)=\int_0^1 (e^x -ax-b)^2 \, dx\ .
$$
Montrer que la fonction $f$ ainsi définie possède un minimum que l'on calculera. On interprètera cette question comme un calcul de distance dans un certain espace euclidien.
Exercice 4. Le plan affine euclidien étant muni d'un repère orthonormé, on considère les points $A(-1,1)$, $B(3,-1)$ et $C(1,4)$. Déterminer les coordonnées du point $H$, projeté orthogonal de $C$ sur la droite $(AB)$.
Exercice 5. L'espace affine euclidien est muni d'un repère orthonormé $(0,\vec{i},\vec{j},\vec{k})$. On fixe $a$, $b$, $c$, $d\in \R^3$, avec $(a,b,c)\not= (0,0,0)$ et $(x,y,z)\in \R^3$. Soient $P$ le plan d'équation $ax+by+cz+d=0$. Montrer que la distance du point $M$ de coordonnées $(x,y,z)$ à $P$ est donnée par
$$
d(M,P)=\frac{\vert ax+by+cz+d\vert}{\sqrt{a^2 +b^2 +c^2}}\ .
$$ -
Voici ma correction de l'exercice 1 :
a)
$E=\mathbb{R}^{3}$, $P$ est le plan vectoriel de $E$ d'équation $2x+y+z=0$, on a donc $dim(E)=3$ et $dim(P)=2$.
On a aussi la formule $E=P\oplus P^{\perp}$, donc $dim(E)=dim(P) + dim(P^{\perp})\Leftrightarrow dim(P^{\perp})=dim(E) - dim(P) = 3-2=1$
Donc il suffit de trouver un vecteur $u\in P^{\perp}$ pour déterminer $P^{\perp}$, or si $u=(2,1,1)$, on a bien que $\forall (x,y,z)\in P$, $<u|(x,y,z)>=2x+y+z=0$, donc $u\in P^{\perp}$ et $P^{\perp}=Vect(u)$.
b)
Détermination de $p(v)$:
Il nous faut une base de $P$, pour cela il faut trouver deux vecteurs $a$ et $b$ linéairement indépendant tel que $a\in P$ et $b\in P$, c'est le cas pour $a=\frac{1}{\sqrt{2}}(0,1,-1)$ et $b=\frac{1}{\sqrt{3}}(1,-1,-1)$
On a comme formule $p(v)=<v|a>a+<v|b>b=. . .=( \frac{x-y-z}{3},\frac{-2x+5y-z}{6},\frac{-2x-y+5z}{6})$
Détermination de $s(v)$:
Par définition d'une symétrie orthogonal, on sait que $v+s(v)=p(v)$, donc :
$s(v)=p(v)-v=(\frac{-2x-y-z}{3},\frac{-2x-y-z}{6},\frac{-2x-y-z}{6})$
c)
$Mat(p)=A=\begin{pmatrix} \frac{1}{3} & \frac{-1}{3} & \frac{-1}{3} \\ \frac{-1}{3} & \frac{5}{6} & \frac{-1}{6} \\ \frac{-1}{6} & \frac{-5}{6} & \frac{1}{6}\end{pmatrix}$
$Mat(s)=B=\begin{pmatrix} \frac{-2}{3} & \frac{-1}{3} & \frac{-1}{3} \\ \frac{-1}{3} & \frac{-1}{6} & \frac{-1}{6} \\ \frac{-1}{3} & \frac{-1}{6} & \frac{-1}{6}\end{pmatrix}$
d)
On sait que $P^{\perp}=Vect(\frac{1}{\sqrt{6}}(2,1,1))$, donc:
$q(v)=(2x+y+z)\frac{1}{\sqrt{6}}\frac{1}{\sqrt{6}}(2,1,1)=(\frac{4x+2y+2z}{6},\frac{2x+y+z}{6},\frac{2x+y+z}{6})$, donc:
$Mat(q)=C=\begin{pmatrix} \frac{2}{3} & \frac{1}{3} & \frac{1}{3} \\ \frac{1}{3} & \frac{1}{6} & \frac{1}{6} \\ \frac{1}{3} & \frac{1}{6} & \frac{1}{6}\end{pmatrix}$
e)
Pour calculer la distance de $v$ à $P$, on a la formule suivante:
$d(v,P)=||q(v)||=\frac{1}{6}\sqrt{(4x+2y+2z)^{2}+(2x+y+z)^{2}+(2x+y+z)^{2}}=\frac{1}{6}\sqrt{6(2x+y+z)^{2}}=\frac{\sqrt{6}}{6}|2x+y+z|$
J'avais mis la valeur absolue sur mon brouillon mais j'avais oublié de le faire ici !
Et merci d'avoir répondu à mes questions ! -
@Juliette. Exercice 1.
Quelques brefs rappels de cours pour commencer.
Soit $F$ un sous-espace d'un espace vectoriel $E$. On a la somme directe orthogonale $E=F\oplus F^\perp$. Tout vecteur $v$ de $E$ s'écrit de façon unique $v=v_{//}+v_{\perp}$, où $v_{//}\in F$ et $v_{\perp}\in F^\perp$. Par définition la projection orthogonale sur $E$ est l'endomorphisme $p\in {\mathcal L}(E)$ défini par $p(v)=v_{//}$. La symétrie orthogonale relativement à $F$ est l'endomorphisme $s$ de $E$ défini par $s(v)=v_{//}-v_{\perp}$. Noter que $s$ et $p$ sont reliés par la relation $s=p-{\rm id}_E$.
Soit $v_0\in E$ fixé. Un théorème du cours affirme que quand $v$ parcourt $F$, la quantité $d(v_0 ,v)=\Vert v-v_0\Vert$ atteint son minimum en un unique point de $E$ ; ce point est le projeté $p(v_0 )$. Ce minimum, c'est-à-dire $d(v_0 ,p(v_0 ))=\Vert v_0 - p(v_0 )\Vert$ s'appelle la distance de $v_0$ à $F$ et se note $d(v_0 ,F)$. Noter que $d(v_0 ,F) =\Vert q(v_0 )\Vert$, où $q$ désigne la projection orthogonale sur $F^\perp$.
Rappelons le :
Théorème. Soient $d={\rm dim}(F)$ et $(e_1 ,...,e_d )$ une base orthonormée de $F$. Alors la projection orthogonale sur $F$ est donnée par la formule :
$$
p(v)=\langle v,e_1 \rangle\, e_1 +\cdots +\langle v,e_d \rangle\, e_d\ , v\in E
$$ -
@Juliette. Exercice. Comme rappelé dans le message précédent, pour la formule de la projection, il faut utiliser une BON de $F$.
Il y a une erreur de calcul dans votre projeté, on doit trouver :
$$
p(v) = (\frac{x-y-z}{3}, \frac{-2x+5y-z}{6}, \frac{-2x-y+5z}{6})\ .
$$
De sorte que les formules qui suivent sont également fausses. Pouvez-vous corriger ? N.B. Vous pouvez éditer votre message.
Ensuite, vous n'avez pas écrit les matrices correctement. Je vous rappelle que si un endomorphisme est donné par
$f(x,y,z)=(ax+by+cz, dx+ey+fz,gx+hy+iz)$, alors sa matrice est
$$
\left(\begin{array}{ccc}a & b & c \\ d & e & f \\ g & h & i\end{array}\right)
$$
Dernière erreur : on a $d(v,P)=\Vert q(v)\Vert$ et non pas $\Vert p(v)\Vert$. Votre formule va devenir un peu plus simple.
Merci de corriger en éditant.
Bon courage et merci pour la première contribution ! -
@Juliette. Dans votre formule finale de la distance, il manque une valeur absolue. N'oubliez pas que, pour $t\in \R$, $\sqrt{t^2}=\vert t\vert$ !
-
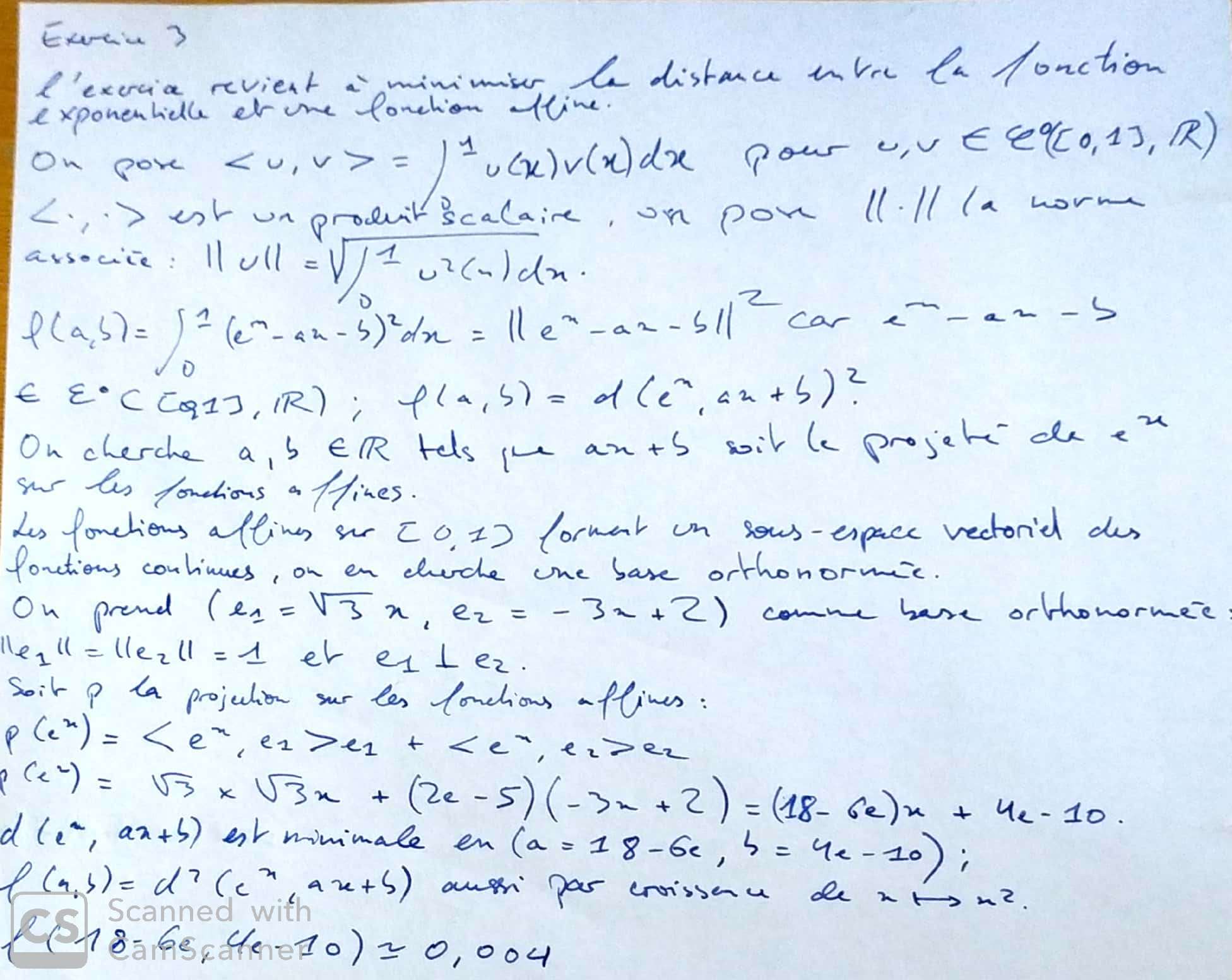
@Thomas. Exercice 3. Il y des choses à revoir et des erreurs de calcul.
La formule du produit scalaire est la bonne, mais pour qu'il soit défini (*), il faut travailler dans l'espace vectoriel $E={\mathcal C}([0,1],\R )$ des fonctions continues de $[0,1]$ dans $\R$.
Pour ce produit scalaire, la norme est $\displaystyle \Vert f\Vert =\sqrt{\int_0^1 f^2 (t)\, dt}$.
Donc $f(a,b)$ est le carré de la distance de $e^x$ à $ax+b$.
Pour cette norme, le vecteur $\sqrt{2}x$ n'est pas normé ! Le vecteur $-6x+4$ est bien perpendiculaire à $x$, mais n'est pas normé !
Je suis preneur d'une version corrigé.
(*) "Défini" comme dans "défini positif". -
@Tarb. Il y a toujours des problèmes avec les carrés ... On a $\Vert x\Vert^2 =3$. De sorte que $e_1$ est normé correctement. Par contre, comme vous l'avez écrit correctement $\Vert -6x+4\Vert =2$ (sans le carré), de sorte que c'est $-3x+2$ qui est normé !
-
Bonjour,
Voici la correction que je propose pour l'exercice 4.
Bonne journée, -
@Emma. Exercice 4. C'est correct ! Cependant, vous pouvez obtenir les équations des deux droites un poil plus rapidement, comme suit.
Un point $M$ appartient à $(AB)$ si, et seulement si, ${\rm det}(\overrightarrow{AM},\overrightarrow{AB})=0$.
Un point $M$ appartient à la perpendiculaire à $(AB)$ passant par $C$ si, et seulement si, $\overrightarrow{CM}\cdot \overrightarrow{AB}=0$. -
Exercice 2
Sans calcul, $(1, 1, 1, 1) \in P$ : tout point de $P$ est de la forme $(a+b, -b, a+b, -b)$ avec $a, b \in \R$, $(1, 1, 1, 1)$ vérifie cette équation. Leur distance est donc nulle. -
@Tarb. Exercice 2. Vous avez raison ! Je vais modifier les données pour rendre l'exercice un peu plus intéressant. Merci.
-
Une nouvelle série d'exercices (produits vectoriels et mixtes).
Dans tous les exercices l'espace affine euclidien est rapporté à un repère orthonormé direct $(0,\vec{i},\vec{j},\vec{k})$.
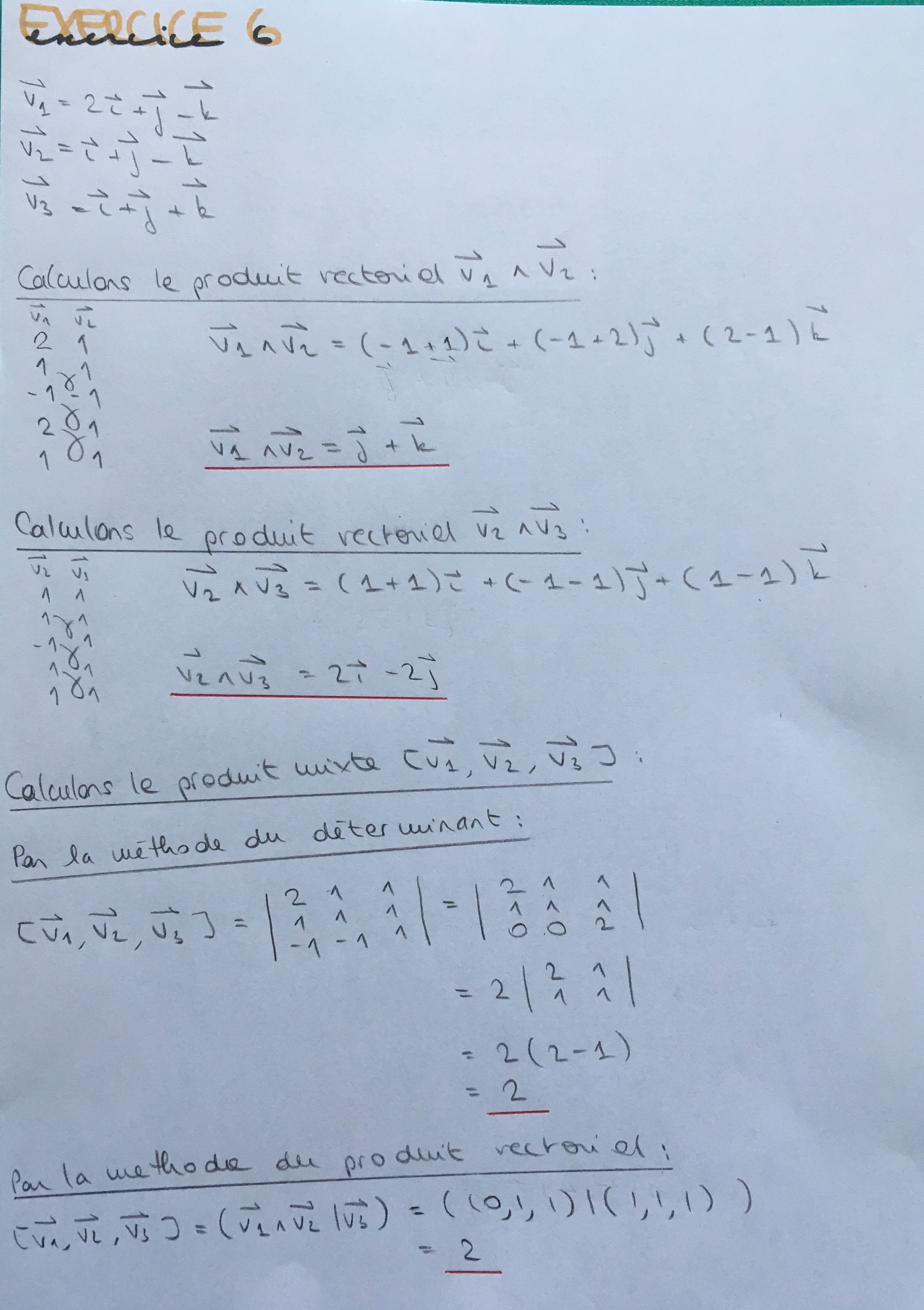
Exercice 6. Soient $\vec{v}_1 =2\vec{i}+\vec{j}-\vec{k}$, $\vec{v}_2 =\vec{i}+\vec{j}-\vec{k}$, $\vec{v}_3 =\vec{i}+\vec{j}+\vec{k}$. Calculer les produits vectoriels $\vec{v}_1\wedge \vec{v}_2$ et $\vec{v}_2\wedge \vec{v}_3$. Calculer le produit mixte $[\vec{v}_1 ,\vec{v}_2 ,\vec{v}_3 ]$ de plusieurs façons différentes (par produit scalaire ou déterminant).
Exercice 7. (a) Donner des équations cartésiennes de la droite vectorielle de $\R^3$, de vecteur directeur $(a,b,c)\not= (0,0,0)$.
(b) Donner une équation cartésienne du plan vectoriel de $\R^3$ engendré par $\vec{u}=(0,1,2,)$ et $\vec{v}=(-1,1,3)$.
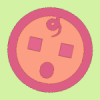
Exercice 8. On travaille dans l'espace affine euclidien orienté.
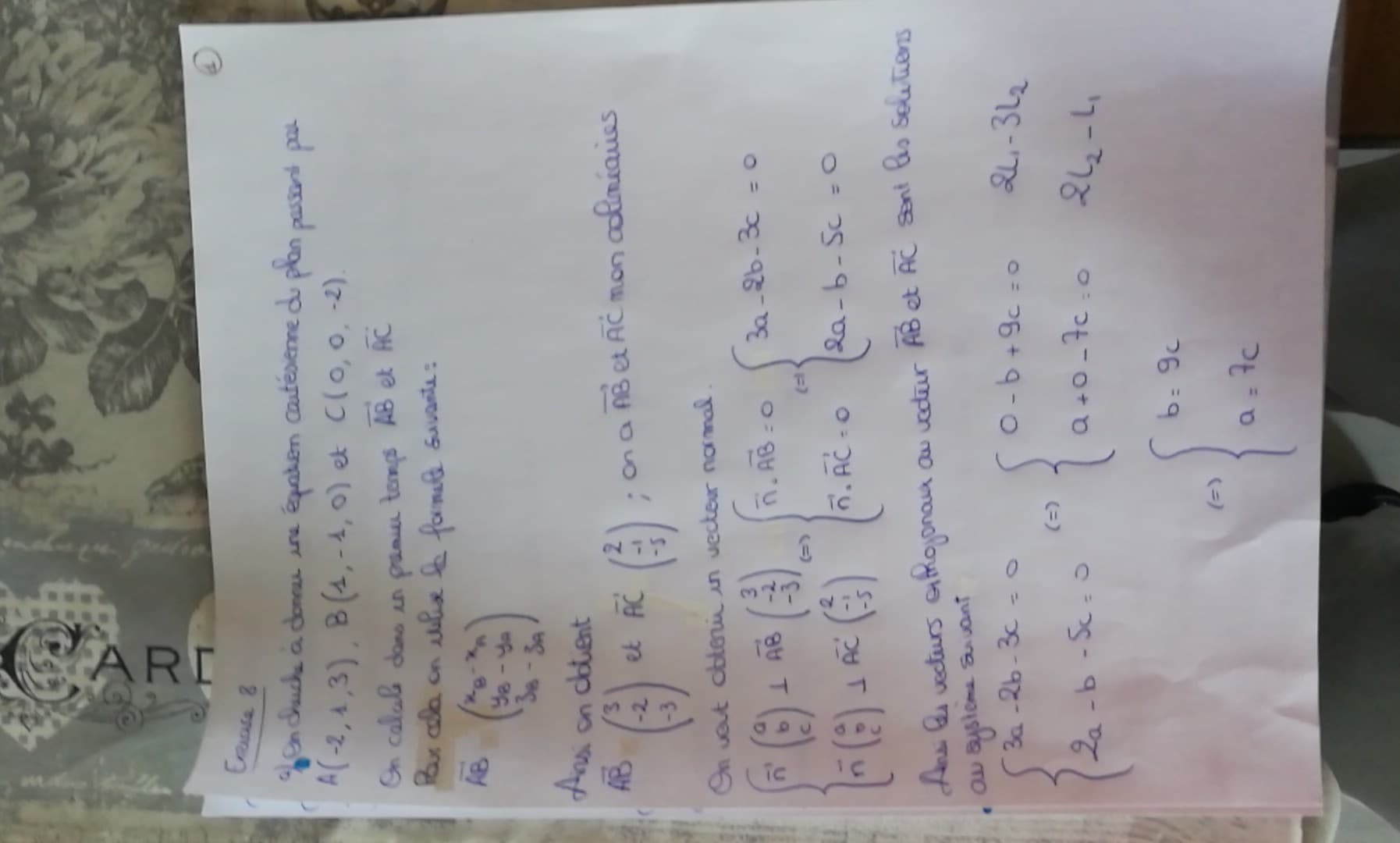
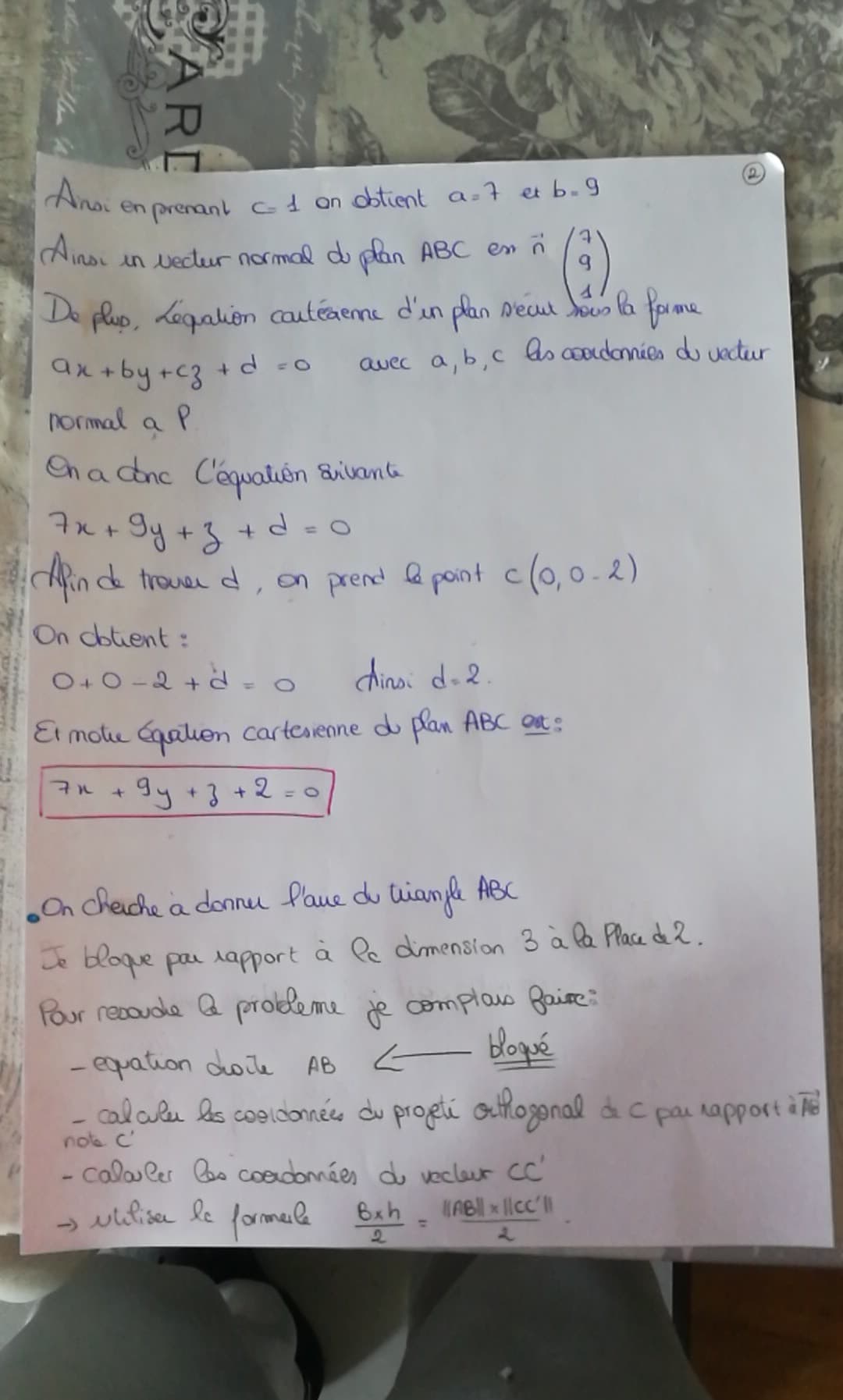
(a) Donner une équation cartésienne du plan passant pas $A(-2,1,3)$, $B(1,-1,0)$ et $C(0,0,-2)$. Donner l'aire du triangle $(ABC)$.
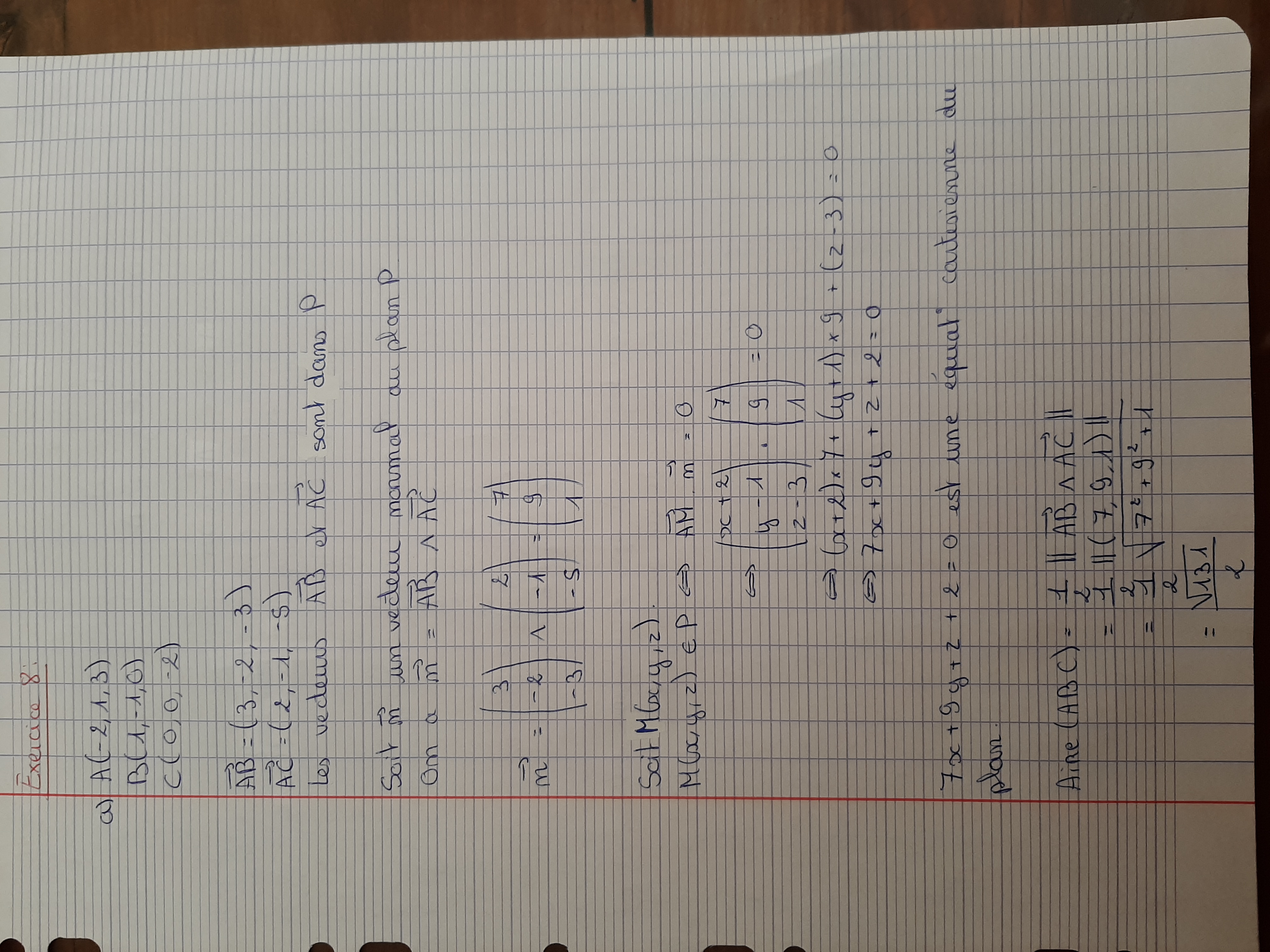
(b) Donner des équations cartésiennes de la droite passant par $D(1,0,1)$ et $E(-1,1,2)$.
Exercice 9. Dans l'espace affine euclidien orienté, on considère les droites $D_1$ et $D_2$ d'équations :
$$
D_1 \ : \ \left\{\begin{array}{rl} x & =0\\ 2y+z & =1\end{array}\right.
\ {\rm et}\
D_2 \ : \ \left\{\begin{array}{rl} x+y & =1\\ x+z & =3\end{array}\right.
$$
On appelle perpendiculaire commune à $D_1$ et $D_2$ l'unique droite $\Delta$ de la forme $(M_1 M_2 )$, avec $M_1\in D_1$ et $M_2\in D_2$, qui est perpendiculaire à $D_1$ et à $D_2$. Déterminer $\Delta$.
N.B. On pourra montrer le fait général suivant (rappelé par Gai Requin) : si deux droites de l'espace affine euclidien ne sont pas coplanaires, elles possèdent une, et une seule, perpendiculaire commune au sens ci-dessus. On observera qu'ici bien sûr $D_1$ et $D_2$ ne sont pas coplanaires.
Edit : Typos corrigées et ajout après commentaire de Gai Requin. -
Bonjour Paul,
J'imagine qu'il manque une virgule dans le produit mixte de l'exercice 6.
De même à l'exercice 9, le second système doit être un système d'équations de $D_2$.
Et avant de parler de perpendiculaire commune à $D_1$ et $D_2$ comme tu l'as défini, il faut d'abord s'assurer que $D_1$ et $D_2$ ne sont pas coplanaires.
C'est d'ailleurs un joli exercice que de montrer l'existence et l'unicité d'une perpendiculaire commune à deux droites non coplanaires de l'espace...
Mais surtout chapeau pour la qualité des échanges avec tes étudiants ! -
Bonjour,
Voici ma proposition de correction pour l'exercice 6.
Bonne fin de journée, -
@Emma. Exercice 6. C'est correct !
Rappels pour tout le monde.
Soit $E$ un espace vectoriel euclidien orienté. Rappelons que cela signifie qu'on a choisi une Base OrthoNormée que l'on a décrété Directe (une BOND). Une autre base orthonormée sera alors qualifiée de directe si la matrice de passage a déterminant $1$ (une telle matrice de passage est une matrice orthogonale et a donc pour déterminant $\pm 1$). Les autres bases sont qualifiées d'indirectes.
Si $(v_1 ,...,v_n )$ est une famille de $n$ vecteurs dans $E$, où $n={\rm dim}(E)$, alors ${\rm det}_{\mathcal B}(v_1 ,...,v_n)$ ne dépend pas du choix de la BOND $\mathcal B$. On l'appelle le produit mixte de la famille de vecteurs, et on le note $[v_1 ,v_2 ,...,v_n ]$.
Supposons à présent que $n=3$. Etant donné deux vecteurs $u$ et $v$ de $E$, il existe un unique vecteur $u\wedge v$ de $E$ tel que
$$
[u,v,w]=\langle u\wedge v,w\rangle , \ {\rm pour}\ {\rm tout}\ w\in E\
.
$$
Le vecteur $u\wedge v$ s'appelle le produit vectoriel de $u$ et $v$.
Rappelons que l'application $E^2\longrightarrow E$, $(u,v)\mapsto u\wedge v$, est bilinéaire et antisymétrique. Elle s'annule exactement quand $u$ et $v$ sont colinéaires.
Si $\theta \in [0,\pi ]$ est une mesure de l'angle non orienté défini par deux vecteurs non nuls $u$ et $v$, alors on a la relation :
$$
\Vert u\wedge v\Vert =\Vert u\Vert \, \Vert v\Vert \, \sin \theta\ .
$$
Si $u$ et $v$ sont deux vecteurs non colinéaires de $E$, $\Vert u\wedge v\Vert$ est une mesure de l'aire du parallélogramme bâti sur $u$ et $v$. Si $u$, $v$ et $w$ sont trois vecteurs linéairement indépendants de $E$, $[u,v,w]$ est une mesure de l'aire du parallélépipède bâti sur $u$, $v$ et $w$. -
Merci Gai Requin !
-
@tarb. Exercice 3. C'est correct, merci !
-
Bonsoir,
Voici ma proposition pour l'exercice 2.
Bonne soirée. -
Exercice 9
Si $\vec{v}_1$ et $\vec{v}_2$ sont des vecteurs directeurs de $D_1$ et $D_2$, $\vec{v}_1\wedge \vec{v}_2$ est orthogonal à $\vec{v}_1$ et $\vec{v}_2$ ; $\Delta$ et $\vec{v}_1\wedge \vec{v}_2$ sont colinéaires.
Je prends $\vec{v}_1 = (0, \frac{1}{2}, -1)$ et $\vec{v}_2 = (-1, 1, 1) : \vec{v}_1\wedge \vec{v}_2 = \frac{1}{2}(3, 2, 1)$.
Soit $M (a, b, c) \in D_1$ et $M'$ tel que $\vec{MM'}$ et $\vec{v}_1\wedge \vec{v}_2$ soient colinéaires : $\exists k \in \R, \vec{MM'} = k(3, 2, 1)$.
Alors $M' \in D_2 \Leftrightarrow \ \left\{\begin{array}{rl} a & =0\\ 2b+c & =1\\ a+3k+b+2k & =1\\ a+3k+c+k & =3\end{array}\right. \Leftrightarrow \ \left\{\begin{array}{rl} a & =0\\ b & =-\frac{3}{7}\\ c & =\frac{13}{7}\\ k & =\frac{2}{7}\end{array}\right.$.
On a $M(0,-\frac{3}{7}, \frac{13}{7}) \in D_1, M'(\frac{6}{7}, \frac{1}{7}, \frac{15}{7}) \in D_2, \vec{M'M} = \frac{2}{7}(3,2,1), \vec{M'M} \perp D_1$ et $\vec{M'M} \perp D_2$. On peut prendre pour équation de $\Delta$ par exemple $x=y+z$.
(Il y avait probablement une façon plus simple de procéder même si mes calculs semblent justes) -
Bonjour,
Voici la correction que je propose pour l'exercice 6.
Bonne journée. -
Merci Elodie, c'est correct.
-
@Tarb. Exercice 9.
Attention qu'il faut deux équations cartésiennes pour définir une droite affine de l'espace !
EDIT : contrairement à ce que j'avais affirmé initialement, les calculs de Tarb sont corrects ! -
Plutôt CAPES, sigle.
-
@Chaurien. C'est vrai !
-
Bonjour, voici mon début de correction
Il me manque des éléments afin de poursuivre mon travail.
Bonne lecture et bonne journée.
Bien cordialement
B.V -
Dans l'exercice 9, sauf erreur de ma part, les valeurs $b=-\frac{11}{14}$ et $c=\frac{11}{7}$ que vous donnez ne vérifient pas la seconde équation $2b+c=1$ et votre point $M_1 (0,-11/14, 11/7)$ n'appartient pas à $D_1$.
-
@Tarb. Vous avez raison, j'ai raté le $1$ dans $2b+c=1$. Par contre, il faut deux équations cartésiennes pour définir une droite affine de l'espace.
-
On m'a demandé une indication pour l'exercice 8b. Pour obtenir des équations cartésiennes d'une droite $(AB)$ de l'espace, on peut noter l'équivalence pour un point $M$ de l'espace :
$$
M\in (AB)\ {\rm si}\ {\rm et \ seulement} \ {\rm si} \ \overrightarrow{AM}\wedge \overrightarrow{AB}=\vec{0} \ .
$$ -
@B. Vandemeulebrouck. Exercice 8a. La méthode et les calculs sont corrects. Cependant vous pouvez aller plus vite en remarquant qu'un point $M$ est dans le plan $(ABC)$ ssi les vecteurs $\overrightarrow{AM}$, $\overrightarrow{AB}$ et $\overrightarrow{AC}$ sont liés ssi :
$$
[\overrightarrow{AB}, \overrightarrow{AC}, \overrightarrow{AM}] =0\ .
$$
Vous pouvez aussi remarquer, ce qui revient au même, que $\overrightarrow{AB}\wedge\overrightarrow{AC}$ est un vecteur normal à $(ABC)$.
L'aire du triangle $(ABC)$, quant à elle, est donnée par la formule $\displaystyle \frac{1}{2}\Vert \overrightarrow{AB}\wedge\overrightarrow{AC}\Vert$. -
Exercice 8
-
@Manon Riffaud. C'est parfait merci !
-
Bonjour,
Merci pour les indications cela m'a bien débloqué, je remet ainsi ma proposition de correction complète de l'exercice 8
Bonne lecture et bonne journée. -
@B. Vandemeulebrouck. Exercice 8b.
Deux choses :
-- Il faut deux équations cartésiennes pour définir une droite de l'espace !!
-- Pour les obtenir, vous n'êtes pas obligée de passer par l'équation paramétrique. Je rappelle que les équations d'une droite s'obtiennent comme suit. Un point $M$ appartient à une droite $(AB)$ de l'espace si, et seulement si, $\overrightarrow{AM}$ et $\overrightarrow{AB}$ sont colinéaires, si, et seulement si, $\overrightarrow{AM}\wedge \overrightarrow{AB}=\vec{0}$. -
Pour l'exercice 9, on peut prendre par exemple pour équation cartésienne de $\Delta$ : $\ \left\{\begin{array}{rl} x & =y+z\\ x & =3z\end{array}\right.$
-
@Tarb.
> Pour l'exercice 9, on peut prendre par exemple
> pour équation cartésienne de $\Delta$ : $\
\left\{\begin{array}{rl} x & =y+z\\ x & =3z\end{array}\right.$
Attention que les équations que vous donnez ici sont celles de la droite vectorielle qui dirige $\Delta$, c'est-à-dire de $\R v_1\wedge v_2$. Il faut rajouter des constantes pour obtenir l'équation de $\Delta$ qui passe par $M$ et $M'$ :
$$
\left\{\begin{array}{rl} x & =\ y+z-\frac{10}{7}\\
x & =\ 3z-\frac{39}{7}\end{array}\right.
$$ -
Je n'avais effectivement pas compris pourquoi une seule équation paramétrique ne suffisait pas, puis j'avais oublié de vérifier que le résultat que je donnais passait bien par $M$ et $M'$. Merci pour vos explications !
-
N.B. Il y a avait une erreur dans la dernière matrice de l'exercice 12.
Nouvelle série d'exercices (isométries du plan et de l'espace).
Exercice 10. Soient $a$, $b$, $c\in \R$. On note $S=a+b+c$ et $T=ab+bc+ca$ et on considère la matrice :
$$
M=\left(\begin{array}{ccc}
a & b & c \\
c & a & b \\
b & c & a
\end{array}\right) \ .
$$
a) Montrer que $M\in {\rm O}_3 (\R )$ si, et seulement si, $T=0$ et $S=\pm 1$.
b) Montrer que $M\in {\rm SO}_3 (\R )$ si, et seulement si, $T=0$ et $S=1$.
c) Montrer que $M\in {\rm SO}_3 (\R )$ si, et seulement si, il existe $k\in [0,4/27]$ tel que $a$, $b$, $c$ sont les racines du polynôme $X^3 -X^2 +k$.
Exercice 11. Soit $E$ un espace euclidien de dimension $3$. Soit $P$ un plan vectoriel de $E$ de vecteur normal unitaire $n$. On note $s_P$ la symétrie orthogonale par rapport à $P$, encore appelée réflexion de plan $P$.
a) Montrer que pour tout $v\in E$, on a :
$$
s_P (v) = v-2\, \langle v,n\rangle \, n\ .
$$
b) On suppose ici que $E=\R^3$ muni de sa structure euclidienne habituelle et que $P$ est le plan d'équation $x+y+z=0$. Donner la matrice de $s_P$ dans la base canonique.
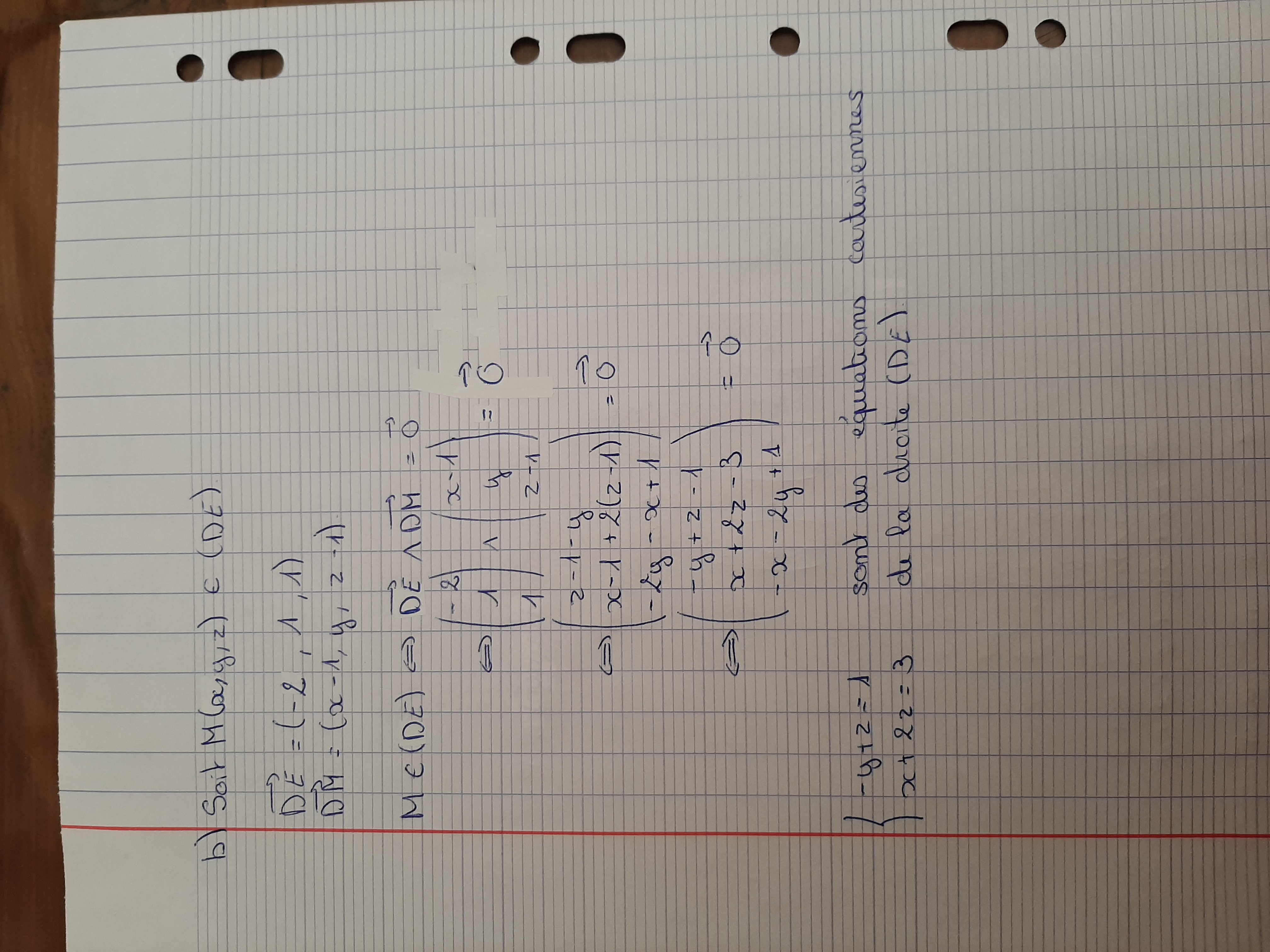
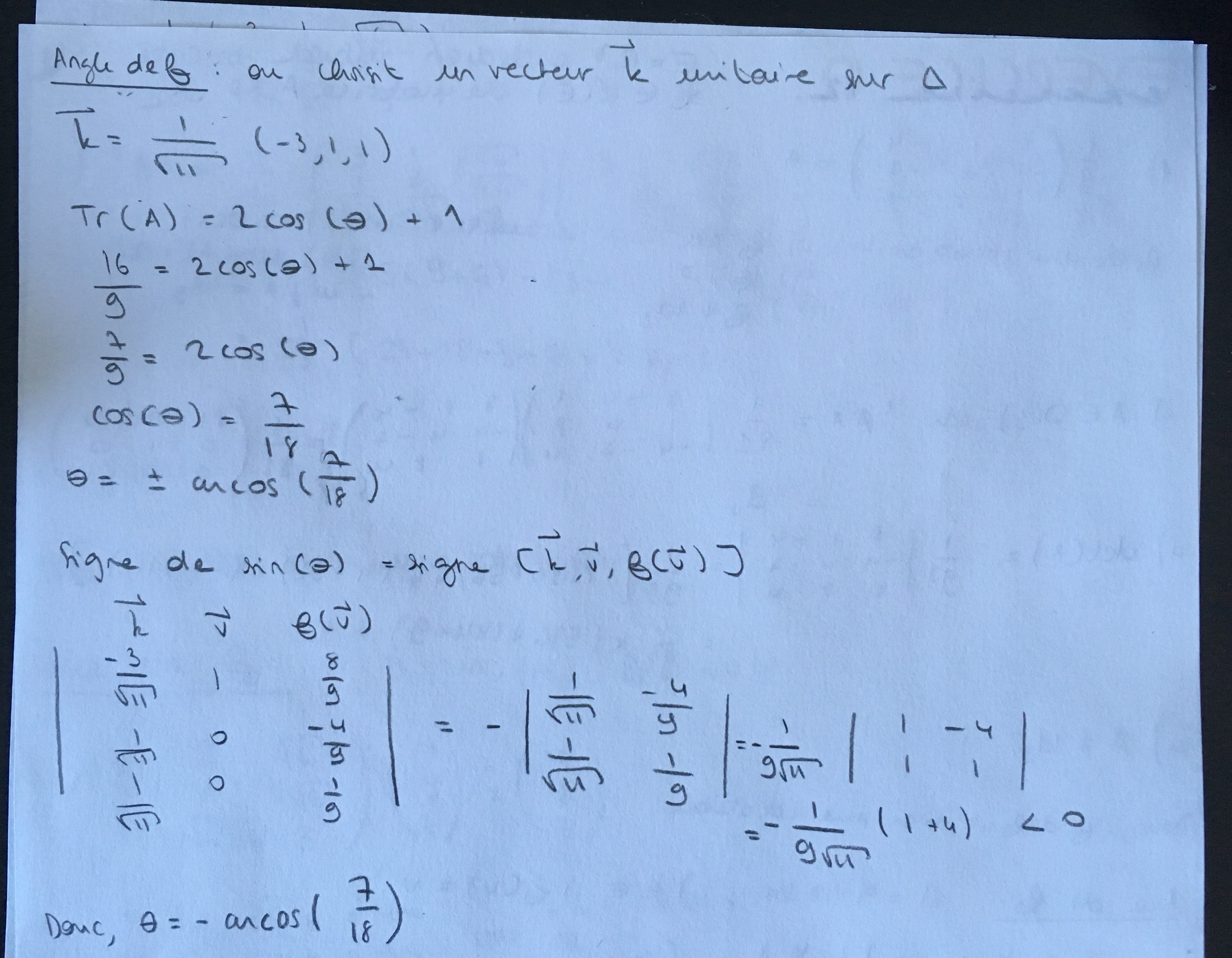
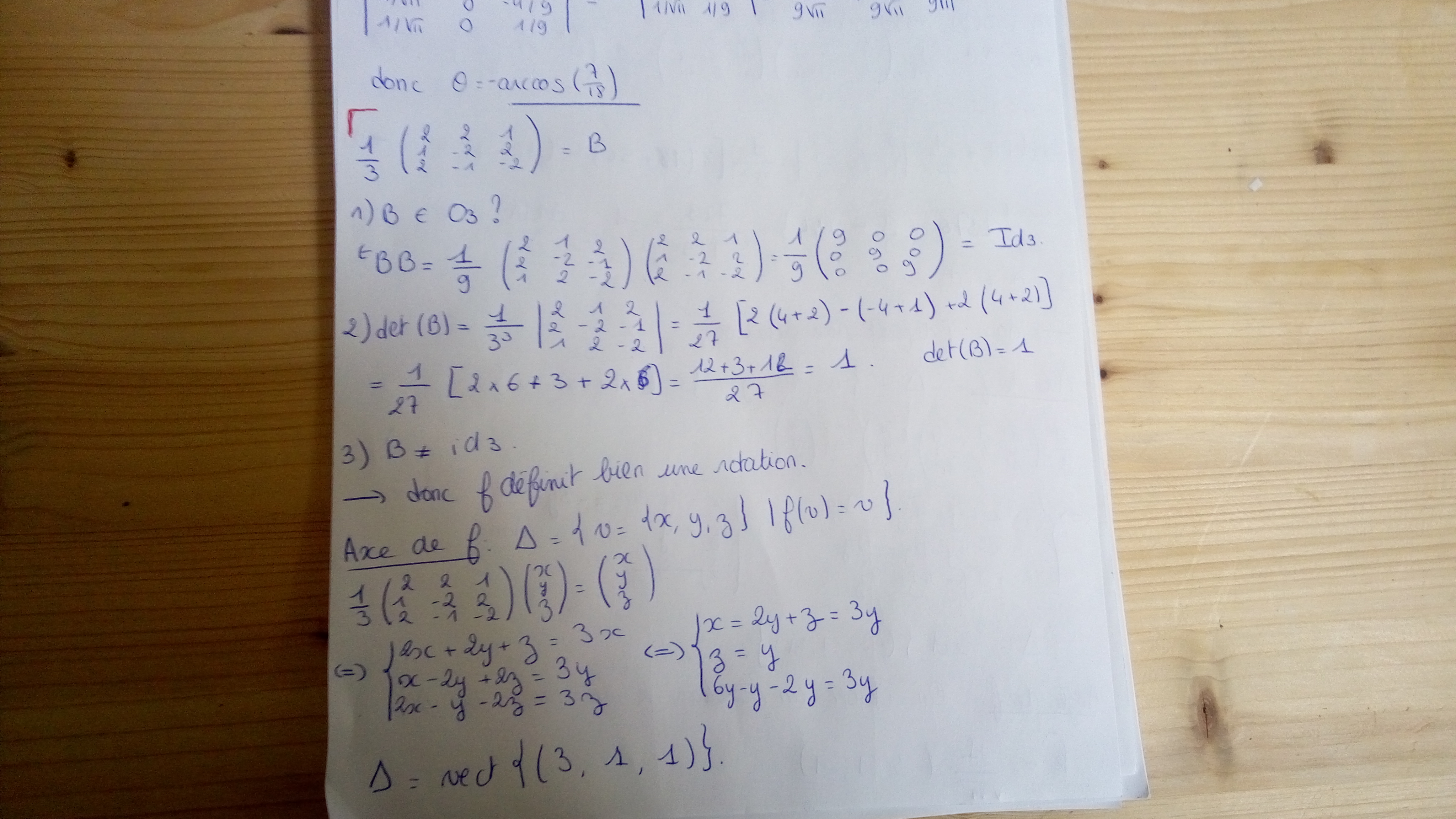
Exercice 12. On considère l'espace vectoriel $\R^3$ euclidien, orienté, usuel. Pour chacune des matrices suivantes, démontrer que l'endomorphisme qui a cette matrice dans la base canonique est une rotation. On précisera son axe et son angle.
$$
\frac{1}{9}\left(\begin{array}{ccc}
8 & 1 & -4 \\
-4 & 4 & -7 \\
1 & 8 & 4
\end{array}\right)
\ \ \ \
\frac{1}{3}\left(\begin{array}{ccc}
2 & 2 & 1 \\
1 & -2 & 2 \\
2 & -1 & -2
\end{array}\right)
\ \ \ \
\frac{1}{4}\left(\begin{array}{ccc}
3 & 1 & \sqrt{6} \\
1 & 3 & -\sqrt{6} \\
-\sqrt{6} & \sqrt{6} & 2
\end{array}\right)
$$
Exercice 13. Dans l'espace vectoriel euclidien orienté $\R^3$, donner la matrice de la rotation $D=\R\, (1,1,1)$, orienté par le vecteur $u=(1,1,1)$, et d'angle $\theta\in \R$ donné. -
Solution de l'exercice 5. En l'absence de volontaire, je propose une solution.
La distance d'un point $M_0 (x_0 ,y_0 ,z_0 )$ de l'espace au plan $P$ d'équation $ax+by+cz+d=0$ est la distance $M_0 H$, où $H$ est le projeté orthogonale de $M_0$ sur $P$. Ce projeté est l'intersection du plan $P$ avec la droite $D$ passant par $M_0$ et orthogonale à $P$. Un vecteur normal à $P$ est $\vec{n}(a,b,c)$, donc l'équation paramétrique de $D$ est $x=x_0 +ta$, $y=y_0 +tb$, $z=z_0 +tc$, $t\in \R$. Il en découle que les coordonnées $(x,y,z)$ de $H$ sont solutions du système :
$$
\left\{ \begin{array}{rl}
x & =x_0 +ta\\
y & =y_0 +tb\\
z & = z_0 +tc \\
ax+by+cz+d & = 0
\end{array}\right.
$$
En injectant les trois premières équations dans la quatrième, on obtient $\displaystyle t=-\frac{ax_0 +by_0 +cz_0 +d}{a^2 +b^2 +c^2}= -\frac{ax_0 +by_0 +cz_0 +d}{\Vert \vec{n}\Vert^2}$. Donc
$$
\overrightarrow{M_0H} = t\, \vec{n}= -\frac{ax_0 +by_0 +cz_0 +d}{\Vert \vec{n}\Vert^2}\, \vec{n}\ .
$$
Donc en prenant la norme on obtient
$$
d(M_0 ,P)=\Vert \overrightarrow{M_0 H} \Vert =\frac{\vert ax_0 +by_0 +cz_0 +d\vert }{\Vert \vec{n}\Vert^2}\, \Vert \vec{n}\Vert = \frac{\vert ax_0 +by_0 +cz_0 +d\vert }{\Vert \vec{n}\Vert}\ .
$$
Ce qu'il fallait démontrer. -
Exercice 10
EDIT2 : corrections c)
a) $M^\intercal M = \left(\begin{array}{ccc}
a^2+b^2+c^2 & ab+bc+ac & ab+bc+ac \\
ab+bc+ac & a^2+b^2+c^2 & ab+bc+ac \\
ab+bc+ac & ab+bc+ac & a^2+b^2+c^2
\end{array}\right) \ = \left(\begin{array}{ccc}
S^2-2T & T & T \\
T & S^2-2T & T \\
T & T & S^2-2T
\end{array}\right) \ .$
$M \in {\rm O}_3 (\R ) \Leftrightarrow M^\intercal M = I_3 \Leftrightarrow \left\{\begin{array}{rl} S^2-2T & =\ 1\\
T & =\ 0\end{array}\right . \Leftrightarrow \left\{\begin{array}{rl} T & =\ 0\\
S & =\ \pm 1\end{array}\right .$
b) $det(M) = \begin{vmatrix} a & b & c\\ c & a & b\\ b & c & a\end{vmatrix} = C_1 \leftarrow C_1+C_2+C_3 \begin{vmatrix} S & b & c\\ S & a & b\\ S & c & a\end{vmatrix} = L_2 \leftarrow L_2 - L_1 , L_3 \leftarrow L_3 - L_1 \begin{vmatrix} S & b & c\\ 0 & a-b & b-c\\ 0 & c-b & a-c\end{vmatrix} = S\begin{vmatrix} a-b & b-c\\ c-b & a-c \end{vmatrix}$
$ = S[(a-b)(a-c)+(b-c)^2] = S[a^2+b^2+c^2-(ab+ac+bc)] = S(S^2-3T).$
$A \in {\rm SO}_3 (\R ) \Leftrightarrow det(M) = 1 \Leftrightarrow S = 1$.
c) Soit $P_k = X^3- X^2 + k$.
On cherche les valeurs de $k$ pour lesquelles les racines de $P_k$ sont toutes réelles ; on va étudier les variations de $f(x) = x^3-x^2+k$.
$f$ est dérivable sur $\R$ et $f'(x) = 3x^2-2x = x(3x-2)$. $f'(x) = 0 \Leftrightarrow x = 0$ ou $x = \frac{2}{3}$.
$f$ est croissante sur $]-\infty ,0]$, décroissante sur $[0, \frac{2}{3}]$, croissante sur $[2/3, +\infty[$.
$f(0) = k$ et $f(\frac{2}{3}) = k - \frac{4}{27}$.
Si $k \in ]0, \frac{4}{27}[$, $k>0$ et $k - \frac{4}{27}<0$ ; f est continue, d'après le théorème des valeurs intermédiaires, on va avoir exactement trois solutions distinctes réelles à $f(x)=0$ : par exemple $a<0$, $b \in [0, \frac{2}{3}]$, $c > \frac{2}{3}$.
Si $k=0$ ou $k=\frac{4}{27}$, on va avoir exactement deux solutions distinctes réelles ; on a par exemple $b=c$. Si $k=0$, on peut prendre $a=0$ et $b=c=1$ ; si $k=\frac{4}{27}$, on peut prendre $a=\frac{2}{3}$ et $b=c=-\frac{1}{3}$ (les racines sont obtenues sans calcul).
Si $k \notin [0, \frac{4}{27}]$, on a une seule racine réelle. On a alors $a=b=c \in \R$, mais le système $\left\{\begin{array}{rl} 3a & =1\\ 3a^2 & =0\\ a^3 & =-k\end{array}\right.$ n'admet pas de solution dans $\R$ : on exclut ce dernier cas.
Donc $M \in {\rm SO}_3 (\R ) \Leftrightarrow \exists k \in [0, \frac{4}{27}], P_k(a)=P_k(b)=P_k(c)=0$. -
@Tarb. Exercice 10. C'est parfait pour a) et b). Pour le c) je vous donne une indication. Si le polynôme $X^3 -X^2 +k$ a trois racines réelles $a$, $b$, $c$, celles-ci vérifierons bien sûr les relations voulues. La condition sur $k$ est donc qu'il faut que la fonction polynomiale $f$, donnée par $f(x)=x^3 -x^2 +k$, $x\in \R$, ait trois racines réelles (comptées avec multiplicités). Pour obtenir cette condition, il suffit d'étudier les variations de $f$.
-
Bonjour,
concernant l'exercice 12, pour vérifier que la matrice correspond bien à une rotation il faut commencer par montrer que la transposée de la matrice fois notre matrice donne la matrice identité. Cependant, ce n'est pas le cas pour la troisième matrice. Es ce qu'il y a une erreur dans la matrice ? Une autre façon de montrer la rotation sans cette condition?
Merci pour votre réponse. -
Bonjour,
Voici ma proposition de correction pour la première matrice de l'exercice 12.
Bonne soirée -
Voici ma proposition pour la deuxième matrice de l'exercice 12.
Bonne soirée -
@Marie. Il y a effectivement une erreur dans la dernière matrice de l'exercice 12. C'est corrigé, merci !
-
@Emma. C'est correct, merci !
-
@Marie. Exercice 12. C'est correct, merci !
Voici quelques rappels pour l'exercice 12.
Soit $E$ un espace vectoriel euclidien de dimension trois. On appelle rotation (vectorielle) une isométrie positive $f$ de $E$ différente de l'identité. En base orthonormée, la matrice $M$ de $f$ doit vérifier :
(a) ${}^t MM=I_3$ ($f$ est une isométrie).
(b) ${\rm det}(M)>0 \iff {\rm det}(M)=1$ ($f$ est un déplacement, ou une isométrie positive).
(c) $M\not= I_3$.
Soit $f$ une rotation. On démontre que l'ensemble $\Delta =\{ v\in E\ ; \ f(v)=v\}$ des vecteurs invariants par $f$ est une droite vectorielle, appelée axe de $f$. Le plan vectoriel $P=\Delta^\perp$ orthogonal à l'axe $\Delta$ est stable par $f$ et la restriction $R=f_{\mid P}$ de $f$ à $P$ est une rotation.
Pour caractériser la rotation $R$, on peut le faire par la mesure de son angle, mais ceci n'a de sens que si on a orienté $P$. Pour orienter $P$, on procède comme suit :
(a) On fixe une orientation de $E$.
(b) On fixe une orientation de l'axe $\Delta$ par le choix d'un des deux vecteurs directeurs unitaires $\vec{k}$.
(c) On décrète qu'une base $(\vec{i},\vec{j})$ de $P$ est directe si la base $(\vec{i},\vec{j},\vec{k})$ de $E$ est directe.
Si l'on procède ainsi, et si l'on fixe une base directe $(\vec{i}, \vec{j})$ de $P$, la matrice de $f$ dans la base $(\vec{i},\vec{j},\vec{k})$ est
$$
\left(\begin{array}{ccc} \cos\theta & -\sin \theta & 0\\
\sin\theta & \cos\theta & 0\\
0 & 0 & 1 \end{array}\right)
$$
où $\theta$ est une mesure de l'angle de $R$. Il s'ensuit que le cosinus de $\theta$ est donné par la relation $2\cos\theta +1={\rm Tr}(f)$. Pour déterminer $\theta$ modulo $2\pi$, il nous faut le signe de $\sin \theta$. Celui-ci est donné par le signe du produit mixte $[\vec{v},f(\vec{v}),\vec{k}]$, où $\vec{v}$ est un vecteur qui n'est pas sur $\Delta$ (prendre un des vecteurs de la base canonique pour simplifier les calculs).
N.B. Dans la rédaction il doit être expressément précisé pourquoi on oriente $\Delta$ ! -
@Tarb. Exercice 10. Votre discussion sur $k$ n'est pas correcte. Je rappelle qu'un réel $a$ est racine de multiplicité $m$ d'un polynôme $P$ si, et seulement si, $P(a)=P'(a)=\cdots =P^{(m-1)}(a)=0$. En particulier seuls $0$ et $2/3$ (les racines de $P'_k$) peuvent être des racines multiples de $P_k$. Pourriez-vous corriger ? Merci !
-
Correction de l'exercice 11.
Exercice 11. Soit $E$ un espace euclidien de dimension $3$. Soit $P$ un plan vectoriel de $E$ de vecteur normal unitaire $n$. On note $s_P$ la symétrie orthogonale par rapport à $P$, encore appelée réflexion de plan $P$.
a) Montrer que pour tout $v\in E$, on a :
$$
s_P (v) = v-2\, \langle v,n\rangle \, n\ .
$$
Rappelons la définition de la symétrie orthogonale de plan $P$. Soit $D=P^\perp$ la droite orthogonale à $P$. Tout vecteur $v$ de $E$ se décompose de façon unique en $v=v_P +v_D$, avec $v_P \in P$, $v_D\in D$. Par définition, $s_P$ est l'endomorphisme de $E$ donné par $s_P (v)=v_P -v_D =v-2v_D$.
Le vecteur $v_D$ est le projeté orthogonale de $v$ sur $D$, qui a pour base $(n)$. Donc par la formule du cours, on a $v_D =\langle v,n\rangle n$. D'où le résultat.
b) On suppose ici que $E=\R^3$ muni de sa structure euclidienne habituelle et que $P$ est le plan d'équation $x+y+z=0$. Donner la matrice de $s_P$ dans la base canonique.
Soit $v=(x,y,z)\in \R^3$. un vecteur normal unitaire à $P$ est $n=\displaystyle \frac{1}{\sqrt{3}}\, (1,1,1)$. Donc
avec les notations du a),
$$
v_D =\langle (x,y,z), \frac{1}{\sqrt{3}}\, (1,1,1)\rangle\, \frac{1}{\sqrt{3}}\, (1,1,1) =\frac{1}{3}\, (x+y+z)(1,1,1) ,
$$
et
$$
s_P (x,y,z)=(x,y,z)-\frac{2}{3}\, (x+y+z)\, (1,1,1) = (\frac{1}{3}x-\frac{2}{3}y-\frac{2}{3}z, -\frac{2}{3}x+\frac{1}{3}y-\frac{2}{3}z, -\frac{2}{3}x-\frac{2}{3}y+\frac{1}{3}z)\ .
$$
Par conséquent, la matrice de $s_P$ dans la base canonique est
$$
\left(\begin{array}{rrr}
\frac{1}{3} & -\frac{2}{3} & -\frac{2}{3}\\
-\frac{2}{3} & \frac{1}{3} & -\frac{2}{3}\\
-\frac{2}{3} & -\frac{2}{3} & \frac{1}{3}
\end{array}\right) \ .
$$
-
Correction de l'exercice 13.
Exercice 13. Dans l'espace vectoriel euclidien orienté $\R^3$, donner la matrice de la rotation d'axe $D=\R\, (1,1,1)$, orienté par le vecteur $u=(1,1,1)$, et d'angle $\theta\in \R$ donné.
Notons $(i,j,k)$ la base canonique de $\R^3$. Par définition, elle est orthonormée directe. Soit $P$ le plan orthogonale à $D$ ; il a pour équation $x+y+z=0$. Une base orthonormée de $P$ est donné par $(i',j')$, où $i' = \epsilon \displaystyle \frac{\sqrt{2}}{2}\, (1,-1,0)$ et $j' = \frac{\sqrt{6}}{6}\, (1,1,-2)$, où $\epsilon =\pm 1$ sera fixé plus tard. On choisit $(k' )$, $k'=\displaystyle \frac{\sqrt{3}}{3} \, (1,1,1)$, comme base orthonormée de $D$.
La base $(i',j',k')$ est orthonormée par construction. Nous allons choisir $\epsilon$ de sorte qu'elle soit directe. Pour cela nous calculons le produit mixte :
$$
[i' ,j',k']=\epsilon \, \frac{\sqrt{2}}{2} \frac{\sqrt{6}}{6} \frac{\sqrt{3}}{3} \left\vert \begin{array}{rrr}
1 & 1 & 1 \\ -1 & 1 & 1 \\ 0 & -2 & 1\end{array}\right\vert =\frac{\epsilon}{6}\, \left\vert \begin{array}{rrr}
1 & 0 & 0 \\ -1 & 2 & 2 \\ 0 & -2 & 1\end{array}\right\vert = \epsilon\ .
$$
On choisit donc $\epsilon =1$. Par définition de la rotation considérée, sa matrice dans la base $(i',j',k')$ est
$$
B= \left( \begin{array}{rrr}\cos\theta & -\sin\theta & 0\\
\sin\theta & \cos\theta & 0\\
0 & 0 & 1\end{array}\right)\ .
$$
Soit $P$ la matrice de passage de la base canonique $(i,j,k)$ à la base $(i',j',k')$ et $A$ la matrice de la rotation dans la base canonique. Alors
$$
P = \left( \begin{array}{rrr}
\frac{\sqrt{2}}{2} & \frac{\sqrt{6}}{6} & \frac{\sqrt{3}}{3} \\ -\frac{\sqrt{2}}{2} & \frac{\sqrt{6}}{6} & \frac{\sqrt{3}}{3} \\ 0 & -\frac{\sqrt{6}}{3} & \frac{\sqrt{3}}{3}\end{array}\right) \ \ {\rm et}\ \ A=PBP^{-1}
$$
De plus, puisque $P$ est orthogonale (comme matrice de passage entre deux bases orthogonales), on a $P^{-1} = {}^t P$. Ainsi $A=PB\, {}^t P$, ce qui donne tous calculs faits :
$$
A=\frac{1}{3}\,\left(
\begin{array}{ccc}
2\cos \theta +1 & -\cos\theta -\sqrt{3}\sin\theta +1 & -\cos\theta +\sqrt{3}\sin\theta +1\\
-\cos\theta +\sqrt{3}\sin\theta +1 & 2\cos\theta +1 & -\cos\theta -\sqrt{3}\sin\theta +1\\
-\cos\theta -\sqrt{3}\sin\theta +1 & -\cos\theta +\sqrt{3}\sin\theta +1 & 2\cos\theta +1
\end{array}\right) \ .
$$
















Connectez-vous ou Inscrivez-vous pour répondre.
Bonjour!
Catégories
- 163.1K Toutes les catégories
- 7 Collège/Lycée
- 21.8K Algèbre
- 37.1K Analyse
- 6.2K Arithmétique
- 52 Catégories et structures
- 1K Combinatoire et Graphes
- 11 Sciences des données
- 5K Concours et Examens
- 11 CultureMath
- 47 Enseignement à distance
- 2.9K Fondements et Logique
- 10.3K Géométrie
- 62 Géométrie différentielle
- 1.1K Histoire des Mathématiques
- 68 Informatique théorique
- 3.8K LaTeX
- 39K Les-mathématiques
- 3.5K Livres, articles, revues, (...)
- 2.7K Logiciels pour les mathématiques
- 24 Mathématiques et finance
- 312 Mathématiques et Physique
- 4.9K Mathématiques et Société
- 3.3K Pédagogie, enseignement, orientation
- 10K Probabilités, théorie de la mesure
- 771 Shtam
- 4.2K Statistiques
- 3.7K Topologie
- 1.4K Vie du Forum et de ses membres
In this Discussion
Qui est en ligne 30





 +24 Invités
+24 Invités